Action Representation
How is a robot’s action space represented when you try to train a model? Some ideas presented in Diffusion Policy.
There are two topics:
-
Joint angle vs. EE pose, and delta actions
-
Explicit vs. implicit policies (we always use implicit now, via some diffusion process)
-
Action normalization
-
More generally, what are the outputs of a robot’s policy? Does that matter? Yes
2 general categorizations:
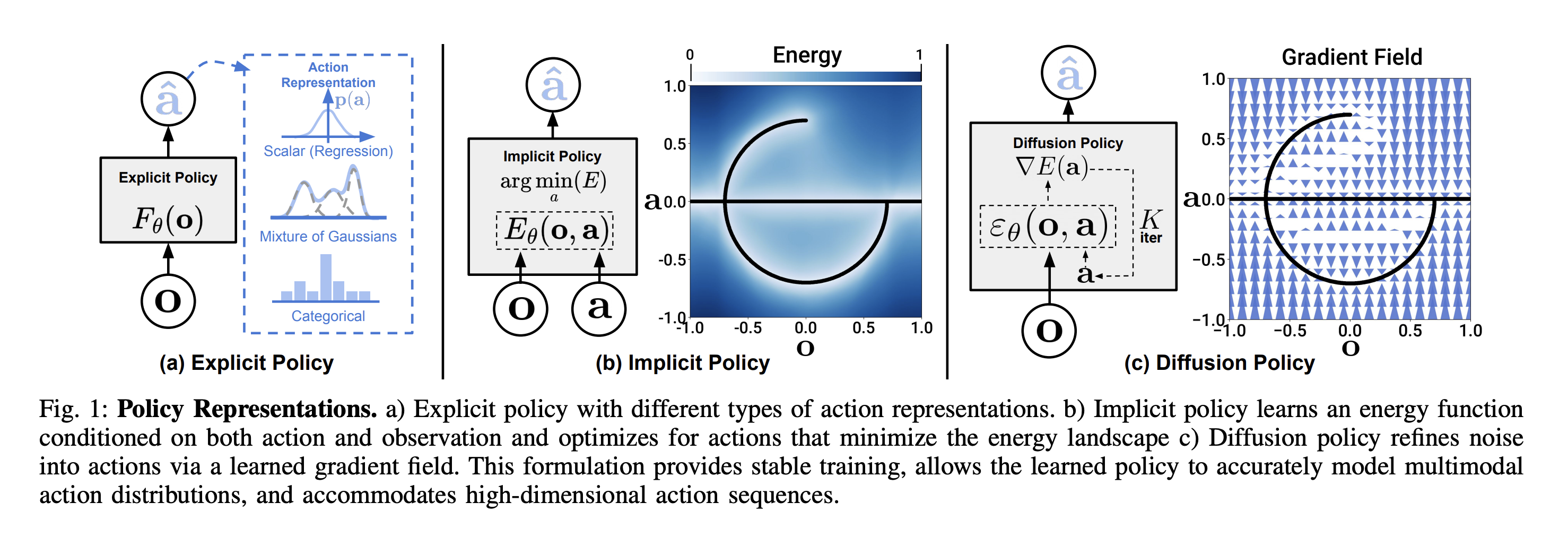
- Explicit Policy
- Scalar output
- Mixtures of Gaussians
- Quantized (categorical) actions
- Implicit Policy
- Energy-based models
- Diffusion-based models
So what does a model actually use?
ACT uses explicit policy, they directly predict the action given a state.
- Explicit Policy: Directly maps states to actions. You can sample sample actions and compute the probability π(a∣s)
- Implicit policy: Defines actions indirectly—you can sample from the policy but can’t compute the exact probability.
Explicit Policy
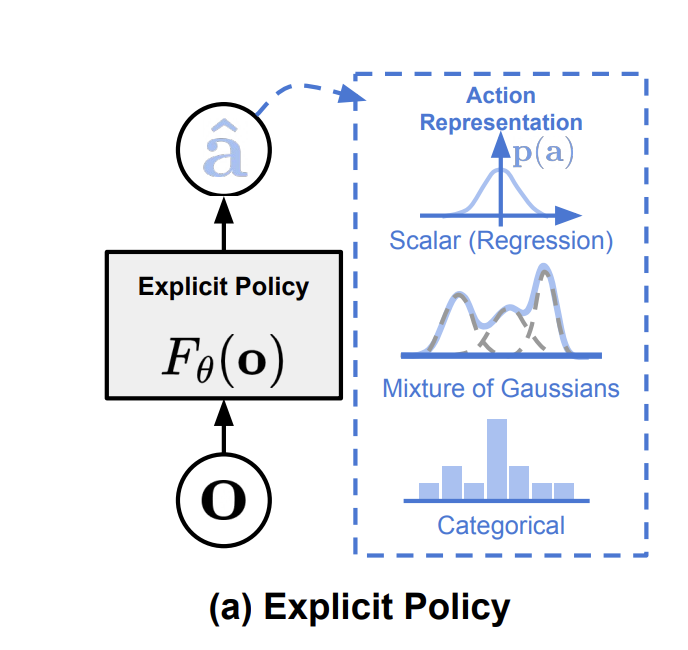
1. Scalar
- Simplest form: Output is a deterministic or probabilistic scalar for each action dimension.
- Often used in classical control or basic reinforcement learning setups.
[0.1, 0.2, ..., -0.1] # Direct joint commands2. Mixture of Gaussians
- Rather than a single scalar, we model the action as a mixture of distributions.
- Good for capturing multi-modal behaviors (e.g., multiple valid trajectories).
Output:
A set of Gaussians over the 7D action space.
[
{"mean": [0.1, 0.2, ..., 0.0], "cov": [[...]], "weight": 0.6},
{"mean": [-0.2, 0.1, ..., 0.4], "cov": [[...]], "weight": 0.4}
]3. Quantized (Categorical) Actions
- Discretize the action space into bins per dimension (like bucketing).
- Output is a categorical distribution over these bins.
- Effective when action precision is low or discrete behaviors are sufficient.
Output:
[0.01, 0.02, ..., 0.3, ..., 0.01] # Probabilities over discrete bins- This is essentially what I did when I worked on my Poker AI to generate different clusters of distributions
Implicit Policy
Unlike explicit policies which output actions directly, implicit policies output samples drawn from a complex, often intractable distribution (e.g., energy-based or diffusion-based).
1. Energy-Based Models
- Define an energy function where low-energy configurations are preferred.
- Actions are sampled by finding low-energy regions (e.g., via Langevin dynamics).
- Often hard to train, but good for flexible, high-capacity distributions.
2. Diffusion-Based Models (e.g., Diffusion Policy)
- Start from random noise in , and denoise iteratively over steps.
- Each step refines the sample toward a realistic, valid action.
Output:
Final denoised action vector in .
# Step-by-step denoising
Start: [0.5, -0.3, ..., 0.1]
After diffusion → [0.12, 0.08, ..., -0.05]- Diffusion captures multi-modal and complex correlations in the action space without explicitly modeling a likelihood.