WATonomous Rosbags
Writing down a list of rosbags that we can use.
All of the rosbags in ROS2 are located under /mnt/wato-drive2 (you will see these if you SSH into Trpro, Thor, or any other of our server cluster machines). The ones we are interested in are:
/mnt/wato-drive2/nuscenes_mcap/ros2bag- contains rosbags from the Nuscenes dataset/mnt/wato-drive2/rosbags2- contains our own rosbags that we have recorded in the past with Bolty, our previous car
These are mounted for you automatically inside the data_stream Docker container:
data_stream:
build:
context: ..
dockerfile: docker/infrastructure/data_stream/data_stream.Dockerfile
cache_from:
- "${INFRASTRUCTURE_DATA_STREAM_IMAGE:?}:${TAG}"
- "${INFRASTRUCTURE_DATA_STREAM_IMAGE:?}:main"
target: deploy
image: "${INFRASTRUCTURE_DATA_STREAM_IMAGE:?}:${TAG}"
volumes:
- /mnt/wato-drive2/nuscenes_mcap/ros2bags:/home/bolty/ament_ws/nuscenes
- /mnt/wato-drive2/rosbags2:/home/bolty/ament_ws/rosbags2
Feel free to explore the rosbags.
Commands
Bring up the data_stream and foxglove container by running watod up data_stream foxglove, and you can play data by running some of the commands below:
Streaming through Foxglove
If you are streaming data through Foxglove over ssh, you should lower the speed at which the rosbag is being played to ~0.2. There is a lot of data being transmitted, and Foxglove will end up dropping lots of messages.
For Nuscenes
watod run data_stream ros2 bag play -l ./nuscenes/NuScenes-v1.0-mini-scene-0061/NuScenes-v1.0-mini-scene-0061_0.mcapFor our bags
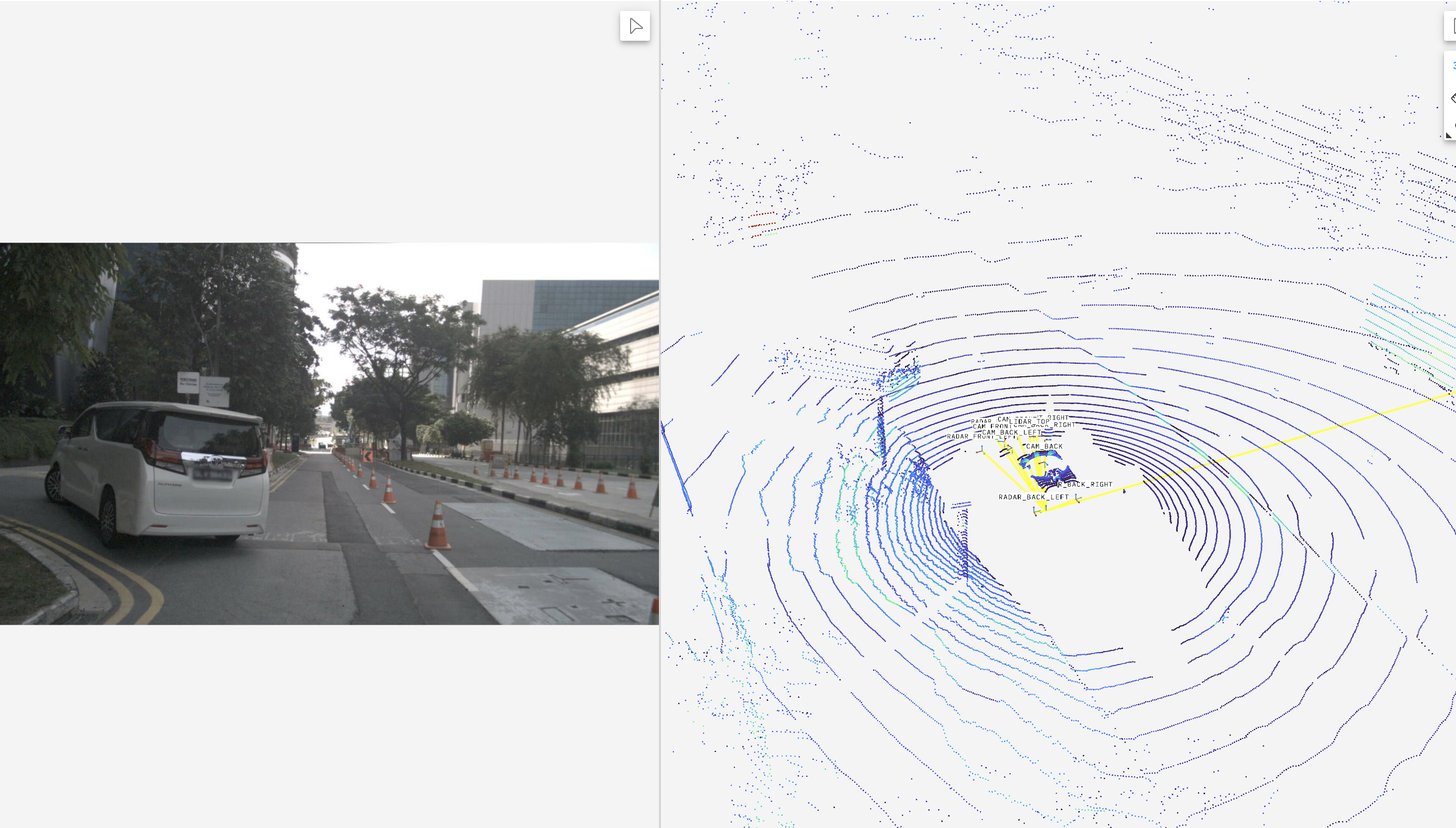
The main juicy bags are the rosbags2/year3/test_track_days/W20.4/traffic_light1 to traffic_light4
Very good overview of the traffic lights, and various signs in Waterloo roads → good for Traffic Sign + Traffic Light Detection

ros2 bag play -l ./rosbags2/year3/test_track_days/W20.4/traffic_light1
Contains the following topic
- `/camera/center/image_color
/camera/left/image_color/camera/right/image_color

ros2 bag play -l rosbags2/year3/test_track_days/W20.4/traffic_light2

ros2 bag play rosbags2/year3/test_track_days/W20.4/traffic_light3
ros2 bag play rosbags2/year3/test_track_days/W20.4/traffic_light4
Car driving through the roads (1 camera, 1 Lidar) → good for Road Segmentation
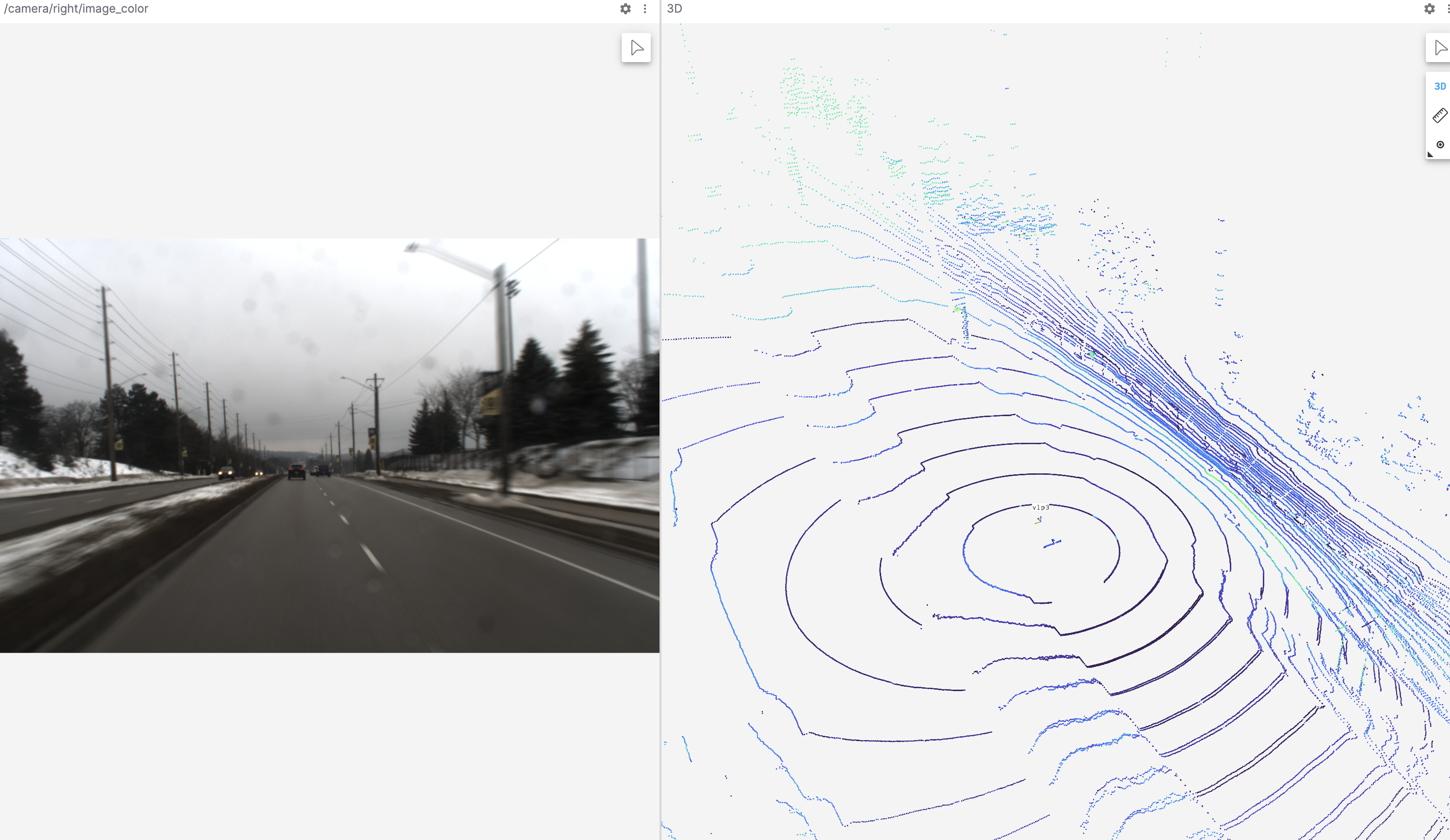
ros2 bag play --start-offset 50 ./rosbags2/year3/test_track_days/W20.0/public_road_to_TT
/camera/right/image_color/velodyne_points
There are some more test_track_days, W20.1 and W20.2 that seem really good for like cyclist and pedestrian datasets, not sure if it is going to work super well though.
People holding a traffic light that switches between different states (1 camera, LiDAR) → good for Traffic Light Detection
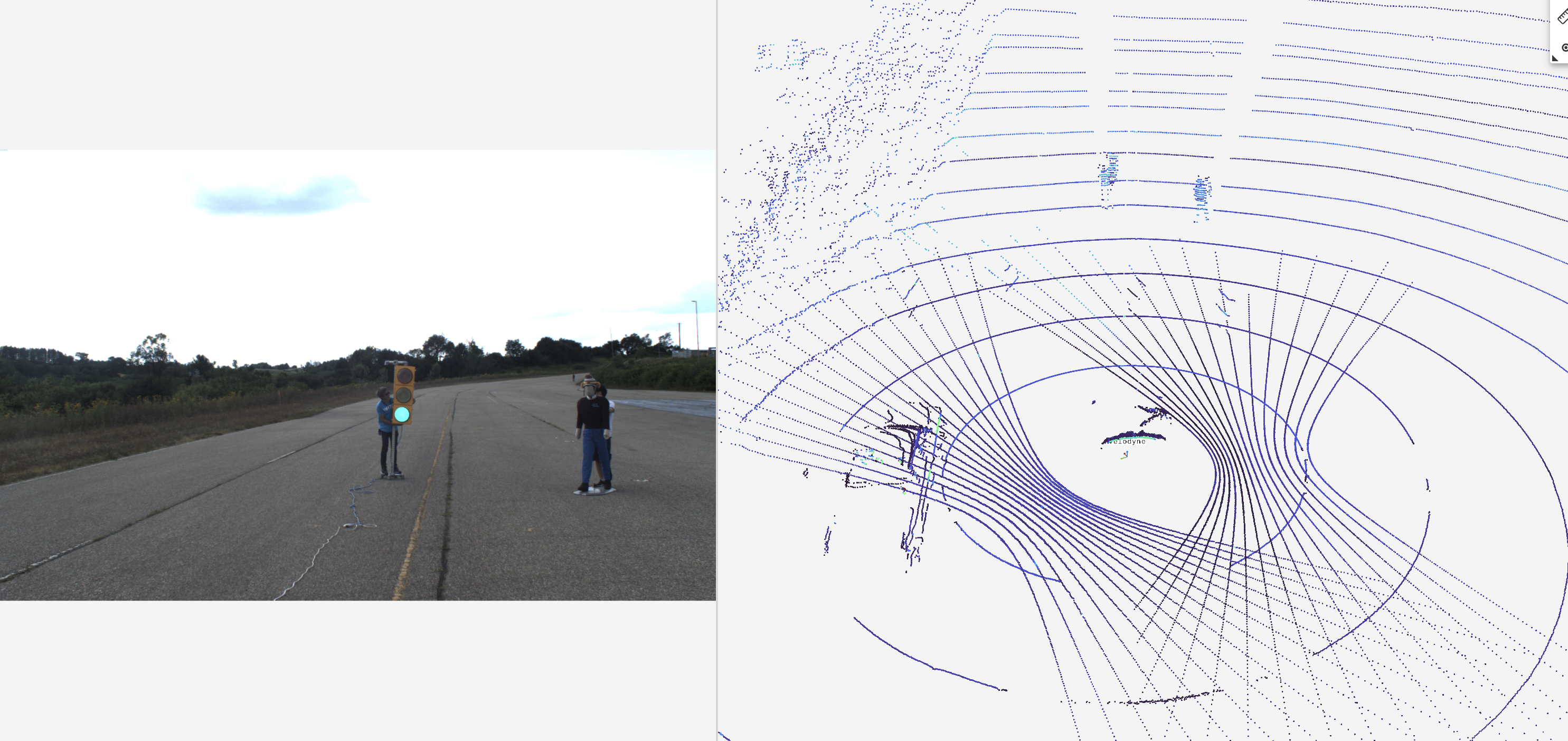
ros2 bag play -l ./rosbags2/year3/test_track_days/aug_10/Compressed/traffic_light_ped_odom/traffic_light_ped_odom.db3
/camera/right/image_color/lidar_merged_visualized- Question
traffic_light_pedvs.traffic_light_ped_odom, are they the same?