WATonomous Software Development
Just some personal notes on how to development new code, focusing on Perception.
Writing nodes How are all these refined predictions going to fit into the pipeline?
-
for now, keep the same format as old architecture.
-
obstacle→ Includes Pedestrian
Creating a new ROS2 package
You shouldn’t need to do this. Steven will take care of this for you.
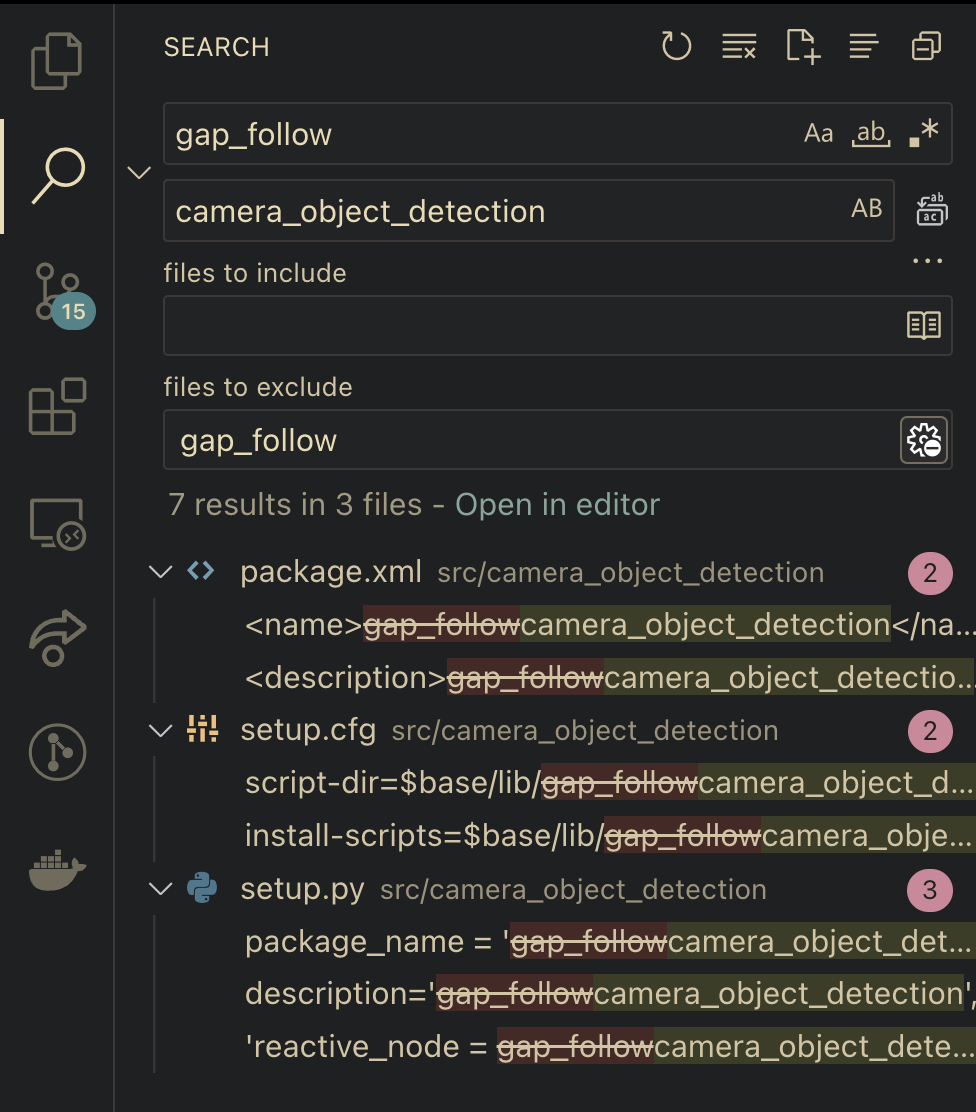
Copy the gap_follow folder under samples/cpp+py into a package that you want (ex: camera_object_detection).
Using VSCode, do search and replace, excluding the gap_follow folders, like this:
- add
docker-composefile - Add
dockerfile - Then, we need to update the
devconfig.shTWICE