Wheelchair Calculations
Top Motor candidates:
- Skateboard motors, 6374
- https://www.mboards.co/
- Turnigy (this is the one james bruton uses) https://hobbyking.com/en_us/turnigy-aerodrive-sk3-6374-192kv-brushless-outrunner-motor.html?___store=en_us
- Falcon 500 from VEX Robotics
Power?
- ?
So concluding that we need about 300W. If it tries to go up the ramp, it is going to start overhead.
300W = V * A
The voltage is fixed, that determines the RPM. Actually, we need to know the power needed to move the body.
When it comes to designing the gearbox at the end, this is going to be very important: what sorts of gear reduction are we looking at?
Assumptions
| Variable | Value | Notes |
|---|---|---|
| Gross Weight | 116kg | 100kg + 16kg = 116kg |
| Rolling Resistance coefficient | 0.002 | Bicycle tire on concrete |
| Time to accelerate | 1s | |
| Maximum Speed | ~3m/s | source , 12km/h demonstration at 4:48 |
| Maximum slope angle | 30deg | the maximum angle at which the wheelchair can move out |
| Variable | Value | Notes |
|---|---|---|
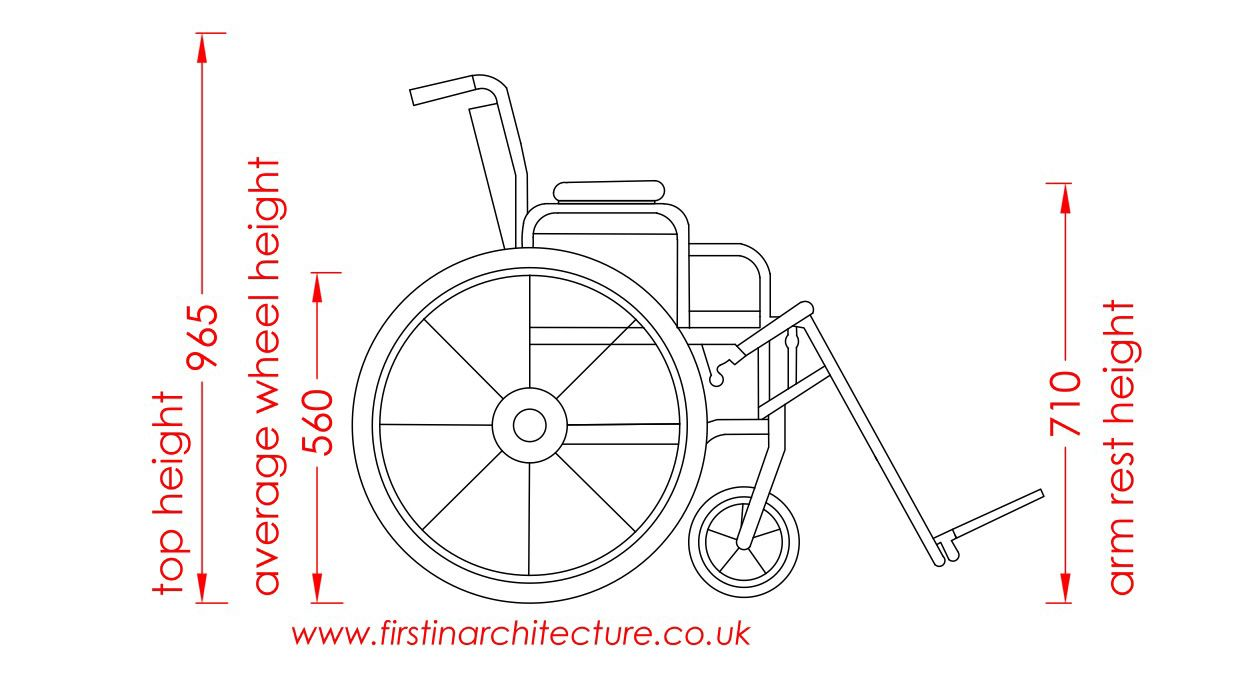
| Wheel radius | 28cm | This is an estimate |
First, let’s see how much force we need to move this wheelchair without acceleration, which is simply given by the following equation.