A Careful Examination of Large Behavior Models for Multitask Dexterous Manipulation
Recommended to me by Krish Mehta.
Project page:
They look at different scaling laws for robotics.
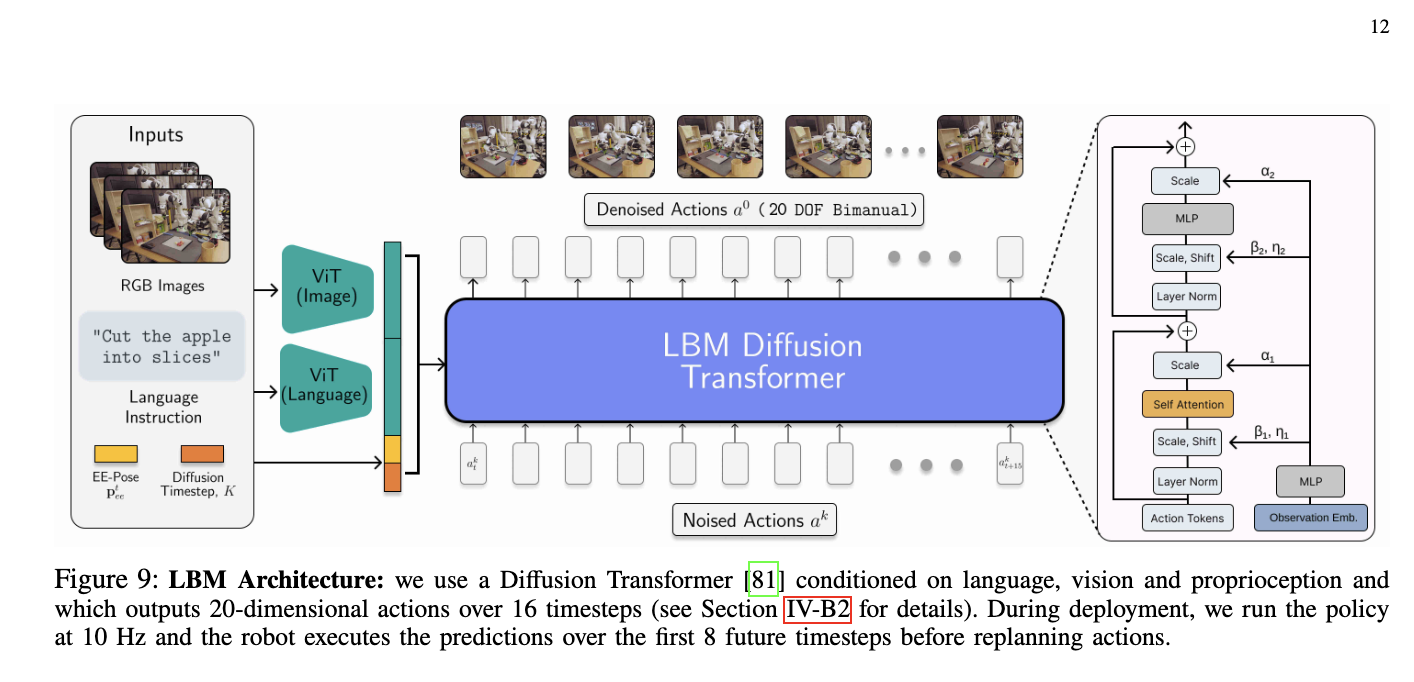
- Uses a Diffusion Transformer
Takeaways:
- Robotics is extremely noisy, in this paper, they use statistical rigor to get conclusive results
- Some talks on normalization