Box Filter
Notes from Cyrill Stachniss.
“Replace an intensity value by the mean intensity value of the neighbourhood”.
For 1D input
For 2D input (image)
We can formulate the box filter by using a weighting function This weighting function is called kernel (or kernel function)
Often, these filtering operators involve weighted combinations of intensity values in a neighborhood.
A filter that transforms is called linear and shift invariant if …
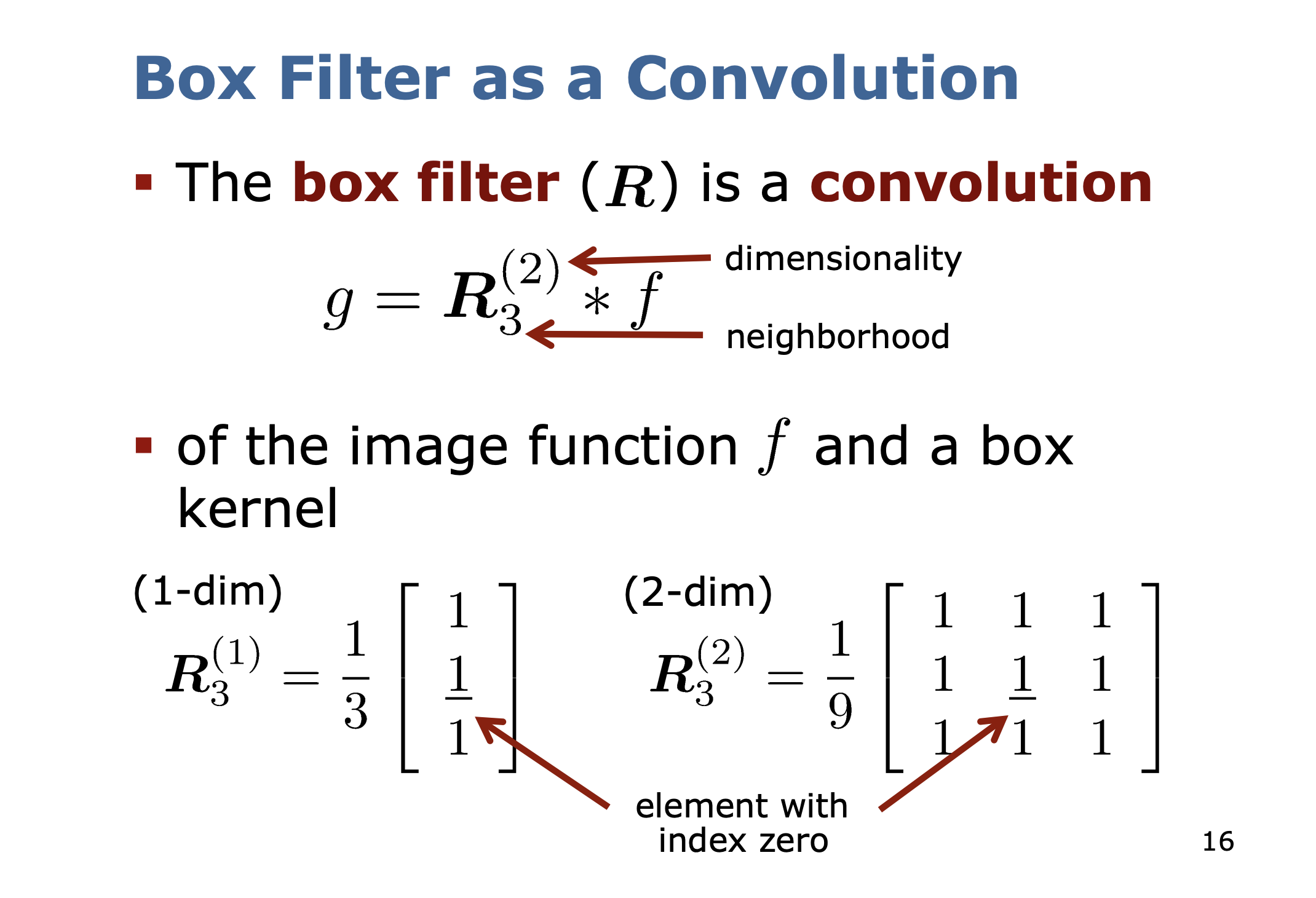
Filters of the form are convolutions of the function and a kernel function