Cyrill Stachniss
Credits to Sachin. See his page for the actual courses that are recommended.
https://www.ipb.uni-bonn.de/photo12-2021/ https://www.ipb.uni-bonn.de/photo12-2021/#2
Lecture Notes
Note: I try to follow Drake Notation for the order of the transforms. So from Cyrill notation to drake notation:
The transform tells you how to go from to , but you think about it in terms of measuring frame in terms of .
Camera Basics and Propagation of Light
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-02-camera.pptx.pdf
Notes moved to Camera.
Local Operators Through Convolutions - Part 1: Smoothing
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-06-local-op-part1.pptx.pdf
I wasn’t going to go through this chapter. But then the teacher was going through the concepts of kernels and filter for the geometric transformations lecture, and I never heard about the box filter.
What is the difference between a filter and a kernel?
They are often used interchangeably.
How is an image actually smoothed?
- I thought it was just resampling
So how is this chapter relevant?
There are 3 types of operators
- Point operators
- Local operators
- Global operators
We can use these for noise reduction in an image.
Box Filter
See Box Filter.
Paddings
See Padding.
Notes on Convolution.
Geometric Transforms of Images
https://www.youtube.com/watch?v=QwU7iSJK8Rk&ab_channel=CyrillStachniss
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-08-geometric-trans.pptx.pdf
I already know my transforms, but it is just a matter of notation.
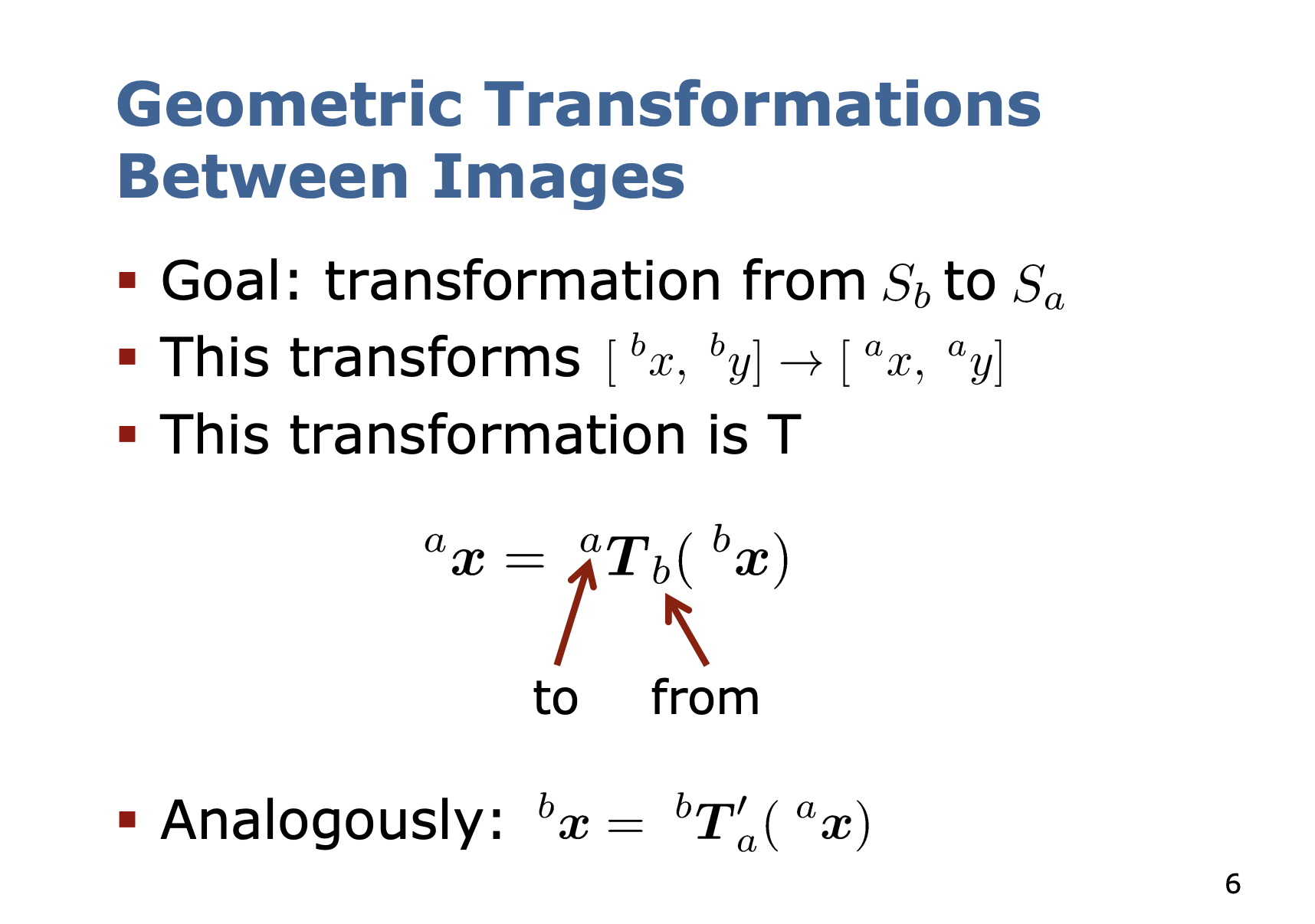
- from frame to frame
Though I don’t like this notation. Why is the “to” on the left..?
- So the confusion is that they say “from to ”, but if you actually look at the transformation itself, the values will be measured from to …
I will use the Drake Notation.
Generally, the transformed pixel coordinates are no longer integers. What should we do?
- My first instinct is to just round the number. But think about what is actually happening under the hood:
- Imagine you scale down an image. There are going to be multiple pixels intensities that map to the same location. Which pixel intensity do you pick?
The solution: resampling
Resampling
See Image Interpolation and Resampling.
Ways to do this:
Okay, but how do we map the values?
- I thought it was just multiplying each pixel by a certain value
- Think about correcting for distortions
Ahh, I think that the interpolation step happens with resampling.
- You have irregular points
- It needs to be clear what mapping direction there is
This is important for scale invariance. But the other option is to use an Image Pyramid.
Camera Parameters - Extrinsics and Intrinsics
Notes moved to Camera Calibration.
Visual Feature Part 1: Computing Keypoints
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-10-features-keypoints.pptx.pdf
Notes moved to Keypoint.
Visual Feature Part 2: Feature Descriptors
https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-11-features-descriptors.pptx.pdf
Math Basics Often Used In Photogrammetry
Slides: http://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-18-math-basics.pptx.pdf
TODO: This will help me understand why we use Eigenvalues
Direct Linear Transform for Camera Calibration and Localization
Slides: http://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-21-DLT.pptx.pdf
This is really fundamental. Notes in Direct Linear Transform.
Least Squares - An Informal Introduction (Cyrill Stachniss)
This is really useful for a handful of problems for state estimation
Graph-Based SLAM is the least-squares approach to SLAM
https://www.youtube.com/watch?v=r2cyMQ5NB1o&ab_channel=CyrillStachniss
slides: file:///Users/stevengong/Downloads/pdf-2021/sse2-03-least-squares.pptx.pdf
Didn’t finish, focusing on camera calibration part
Camera Calibration using Zhang’s Method (Cyrill Stachniss)
slides: http://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-22-Zhang-calibration.pptx.pdf
Notes in Zhang’s Method.
Projective 3-Point Algorithm
This is how you actually infer the position of the camera.
I want to glance at this to understand the implementation of this at an architecture level.
Slides: http://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-23-p3p.pptx.pdf
Notes in Projective 3-Point Algorithm.
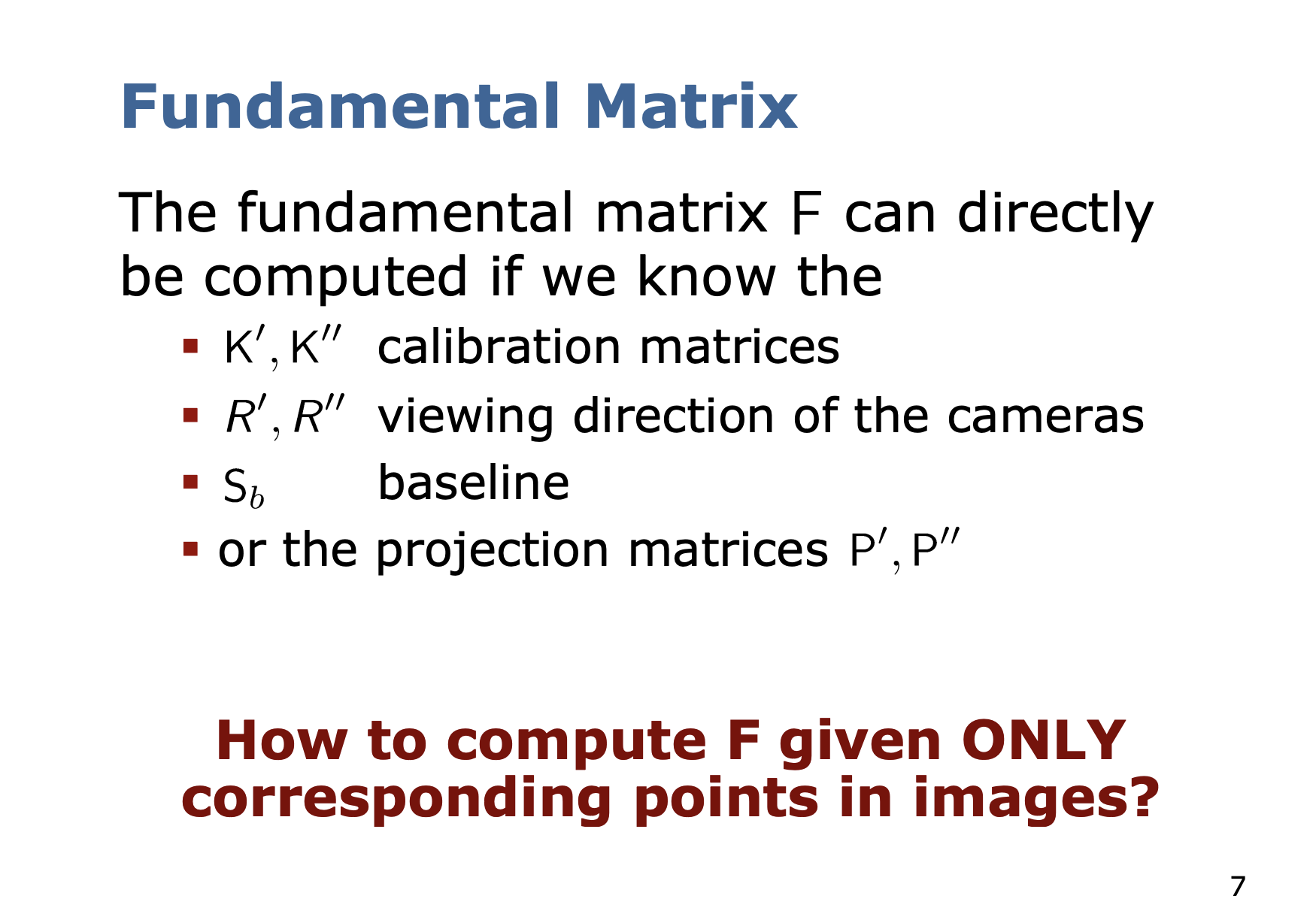
Relative Orientation, Fundamental and Essential Matrix (Cyrill Stachniss)
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho2-02-fundamentalmatrix.pptx.pdf
Notes in Relative Orientation, Essential Matrix and Fundamental Matrix.
Epipolar Geometry Basics
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho2-03-epipolar-geometry.pptx.pdf
See Epipolar Geometry.
Direct Solution
Slides: https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho2-04-fe-direct.pptx.pdf
i think you need to review DLT before going into this lecture.
Triangulation for Image Pairs
See Triangulation.
The Basics about Bundle Adjustment
Notes in Bundle Adjustment.