CAN Bus
A Controller Area Network (CAN bus) is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each other’s applications without a host computer. It is a message-based protocol, designed originally for multiplex electrical wiring within automobiles to save on copper, but it can also be used in many other contexts.
Resources
- CAN Protocol Explained | Controller Area Network
- this video is really helpful
- CAN Bus: Serial Communication - How It Works?
Frame Format
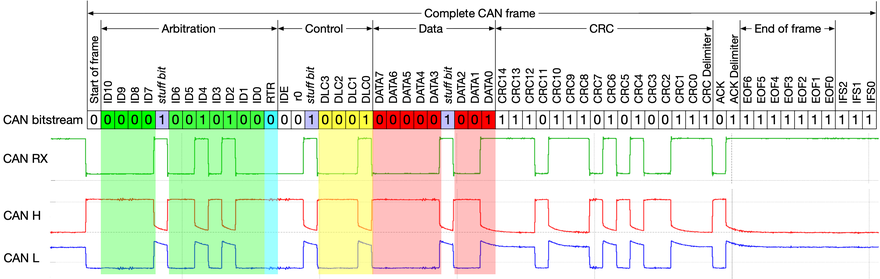
- The stuff bits are interesting, they are there just to make sure that there is no short-circuit
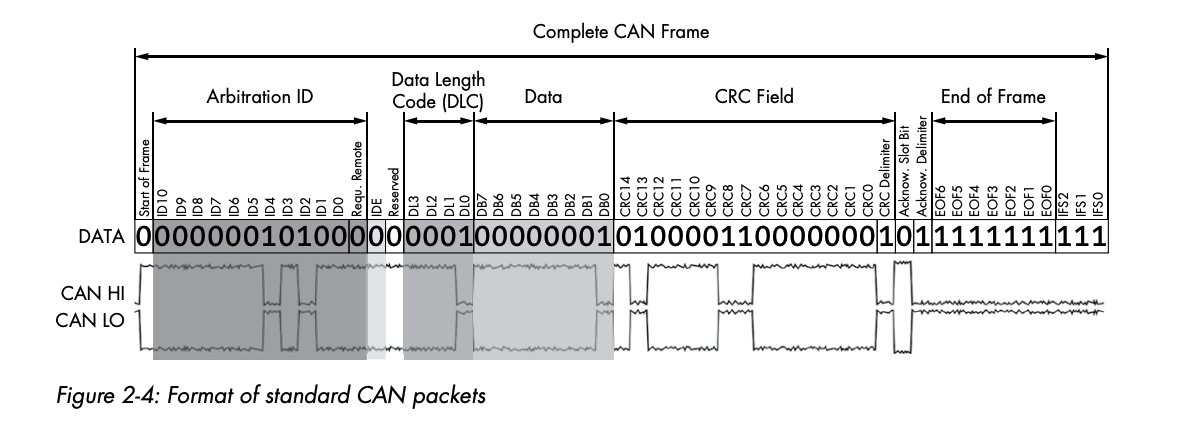
- From the Car Hacker’s Handbook
Why CAN?
CAN is designed for real-time communication.
Compared to UART, which communicates point-to-point, CAN is a multi-node protocol.
CAN Is both a protocol and a physical layer, whereas Ethernet is not.
Difference with Ethernet
- CAN: When you refer to a “CAN bus,” you’re talking about both the physical wiring and the communication protocol that dictates how devices interact on that network.
- Ethernet: When you refer to “Ethernet,” you’re primarily talking about the physical medium (and some aspects of data link layer communication), but not the higher-level protocols like TCP or IP that would run over that medium. Ethernet provides the foundation for other protocols to operate on top of it.
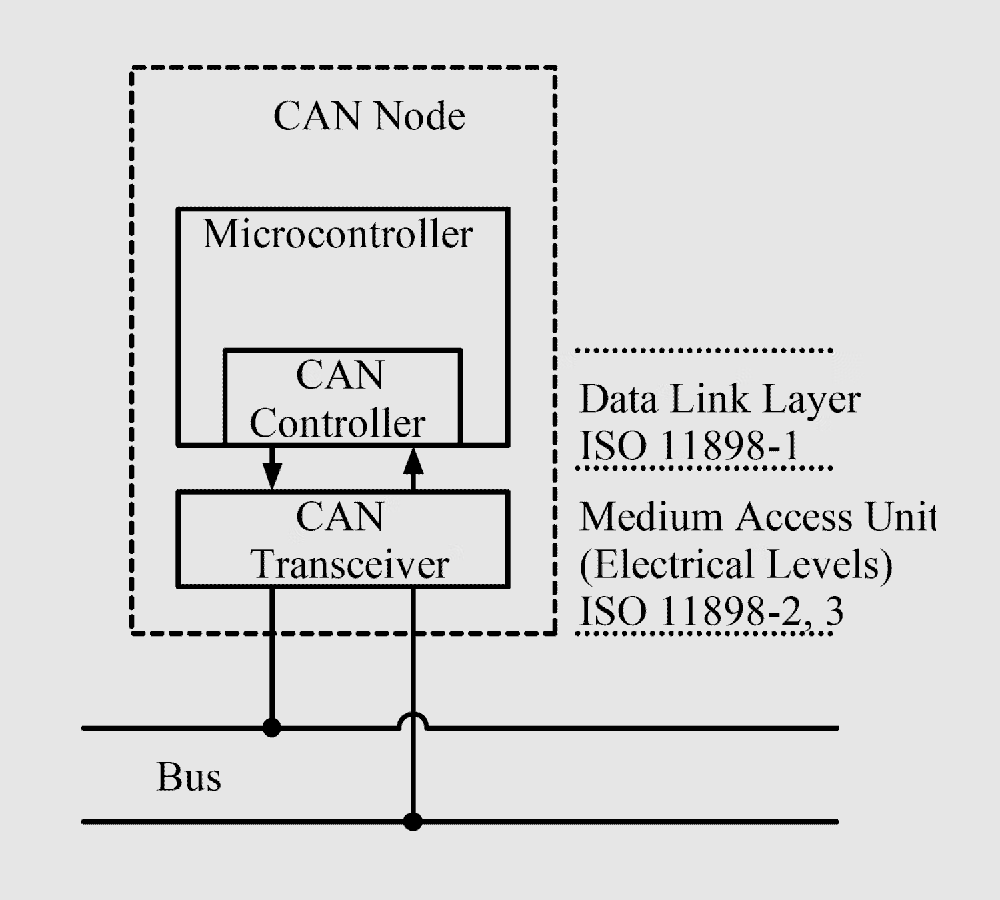
There are 2 different layers:
- Data Link Layer
- Physical Layer (PHY layer)
- At the physical layer, Differential Signaling is used to read voltage values
This follows the first two layers of the OSI Model, but layers 3 and above are not defined by CAN.
Physical Layer
CAN High and CAN Low.