Descriptor
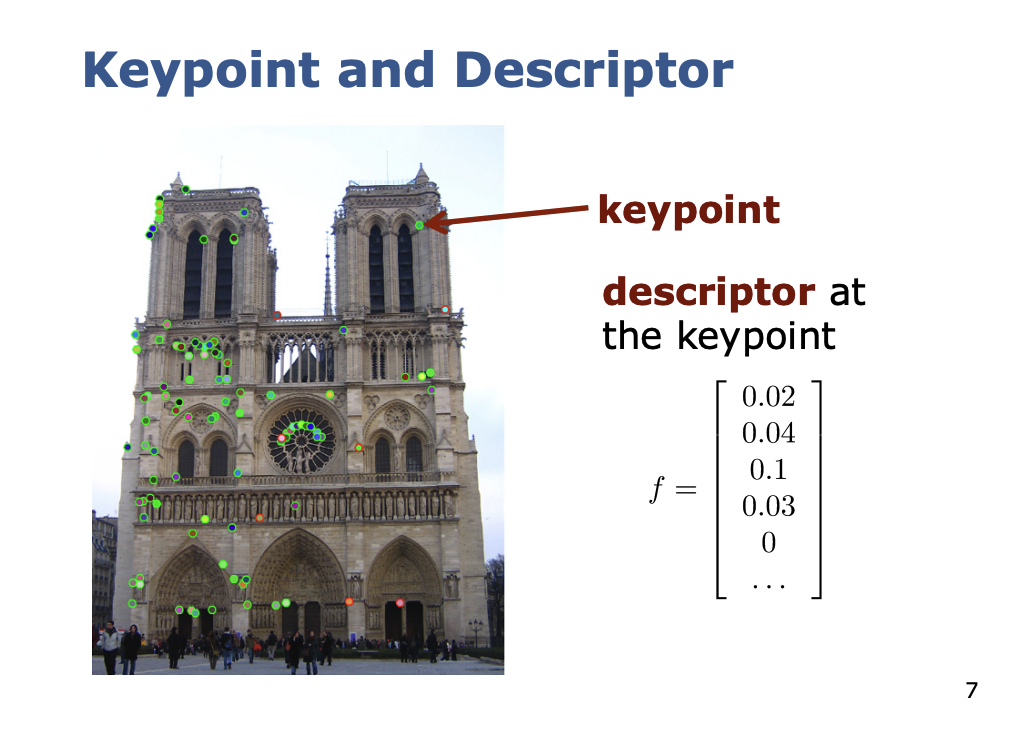
There are LOTS of popular feature descriptors
- HOG: Histogram of Oriented Gradients
- SIFT: Scale Invariant Feature Transform
- SURF: Speeded-Up Robust Features
- GLOH: Gradient Location and Orientation Histogram
- BRIEF: Binary Robust Independent Elementary Features
- ORB: Oriented FAST and rotated BRIEF
- BRISK: Binary Robust Invariant Scalable Keypoints
- FREAK: Fast REtinA Keypoint
Nowadays
There are also learning-based methods, which learn the features instead of hand-engineering them nowadays.
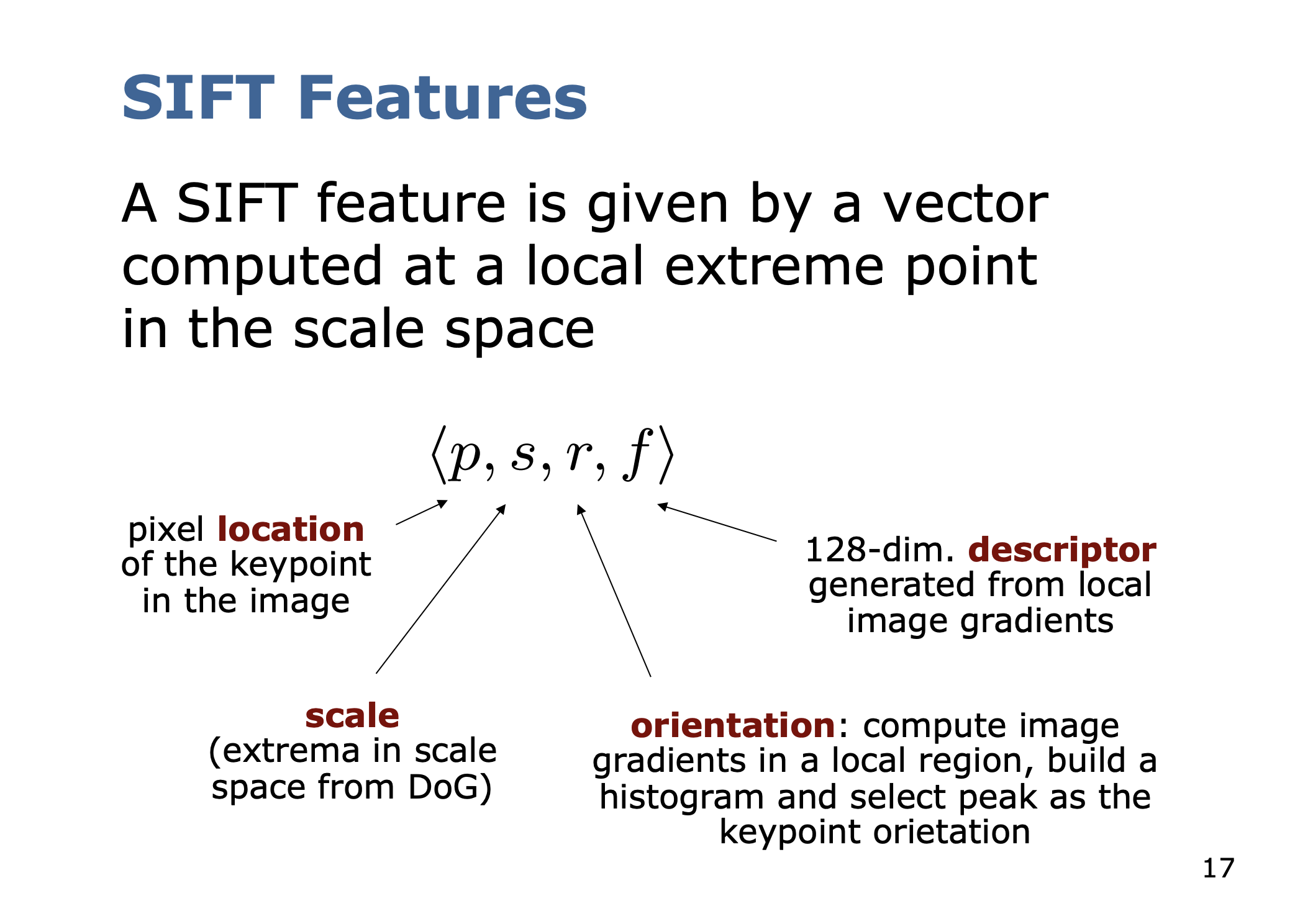
SIFT: Scale Invariant Feature Transform
- Hand-engineered
Image content is transformed into features that are invariant to
- image translation
- rotation
- scale
Partially invariant to
- illumination changes
- affine transformations and 3D projections
Suitable for detecting visual landmarks
- from different angles and distances
- with a different illumination
So how does it achieve that?
We are about to find out.
- and view-point dependent
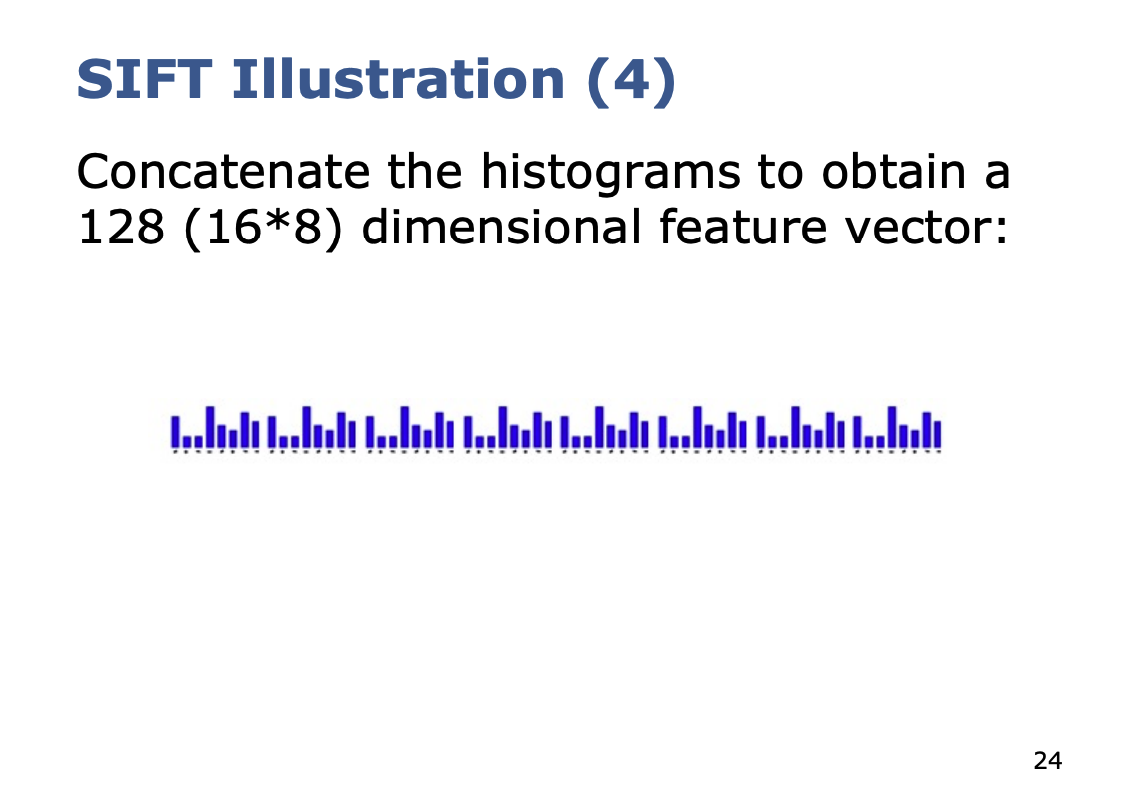
- The 128-dim descriptor is mainly independent
So how does it work? The Cyrill illustration are super helpful.
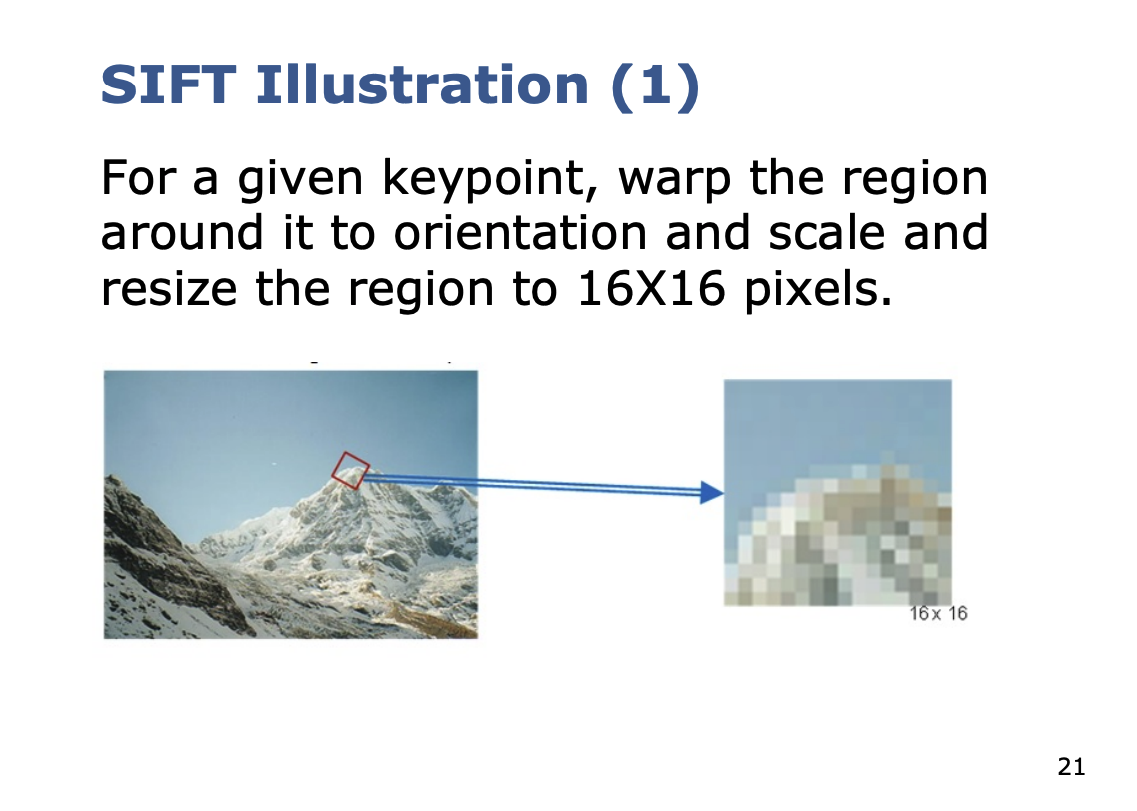
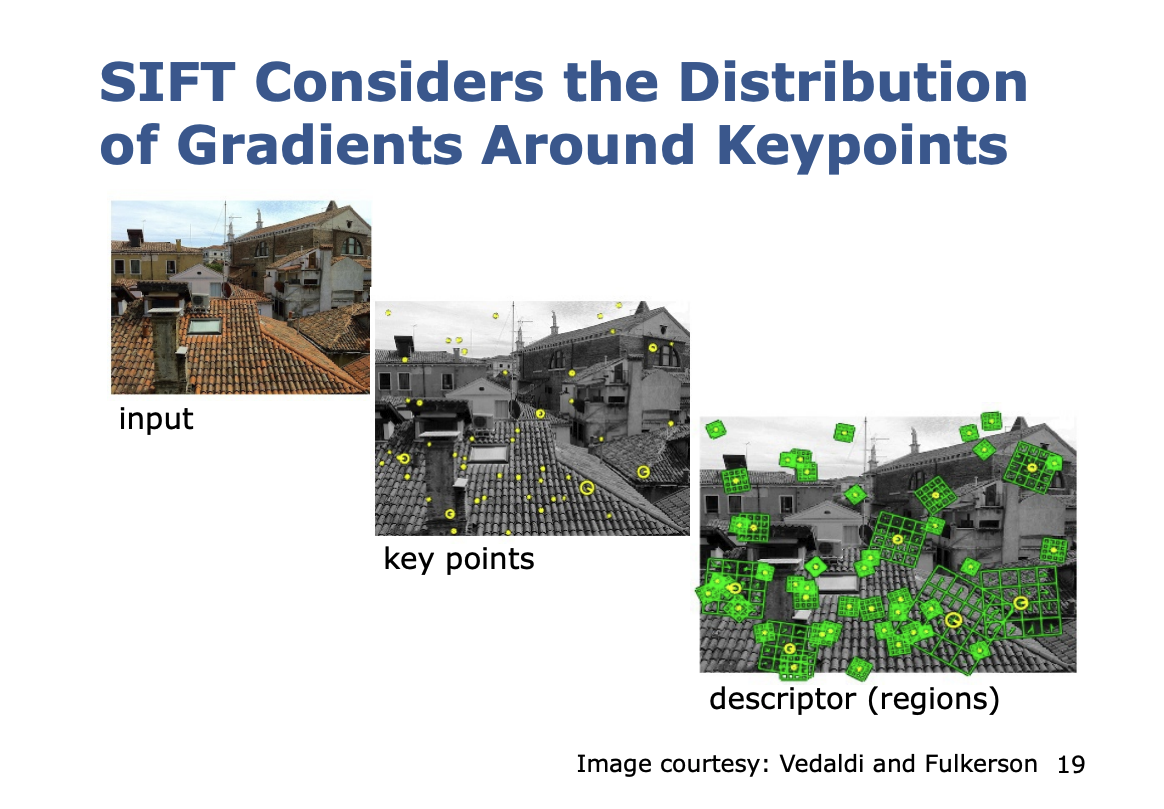
So high level:
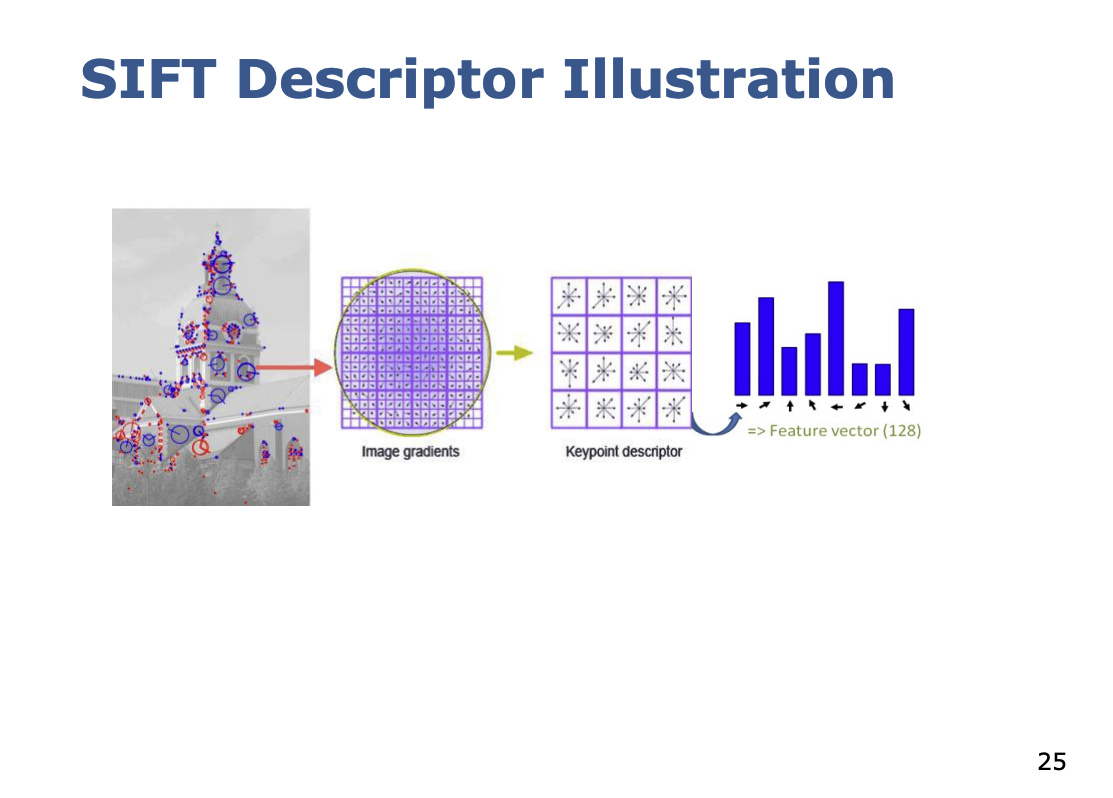
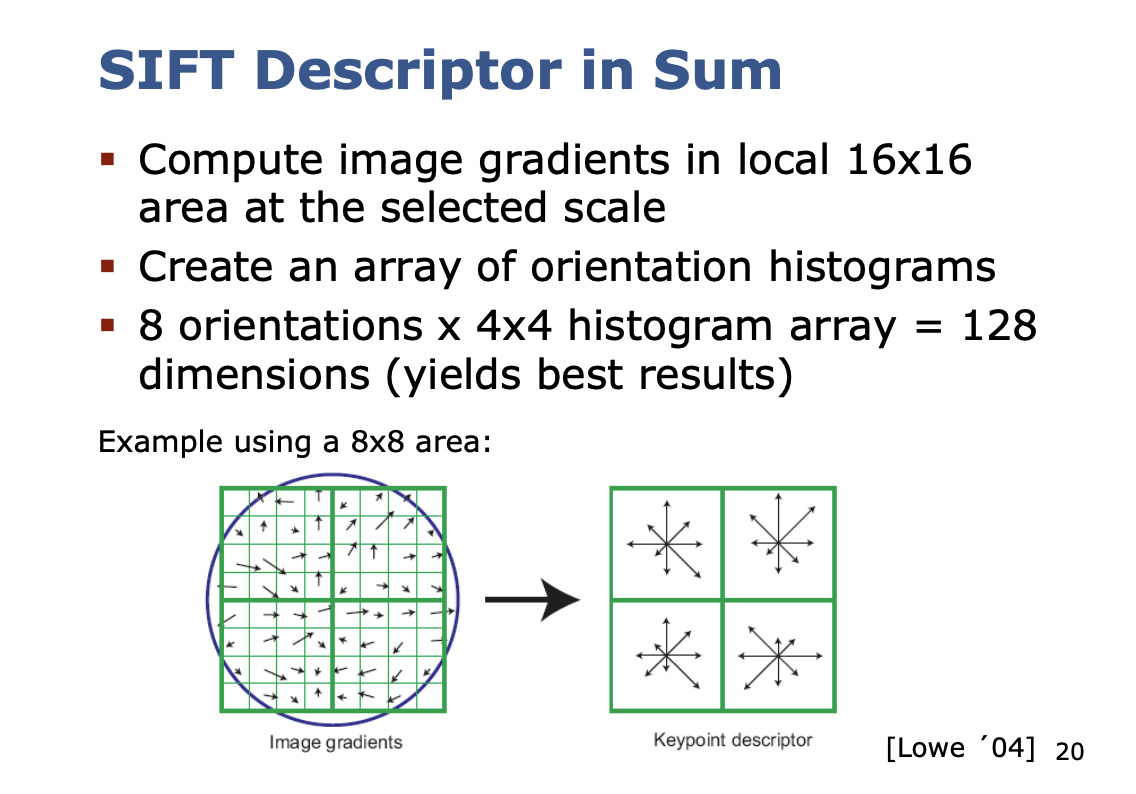
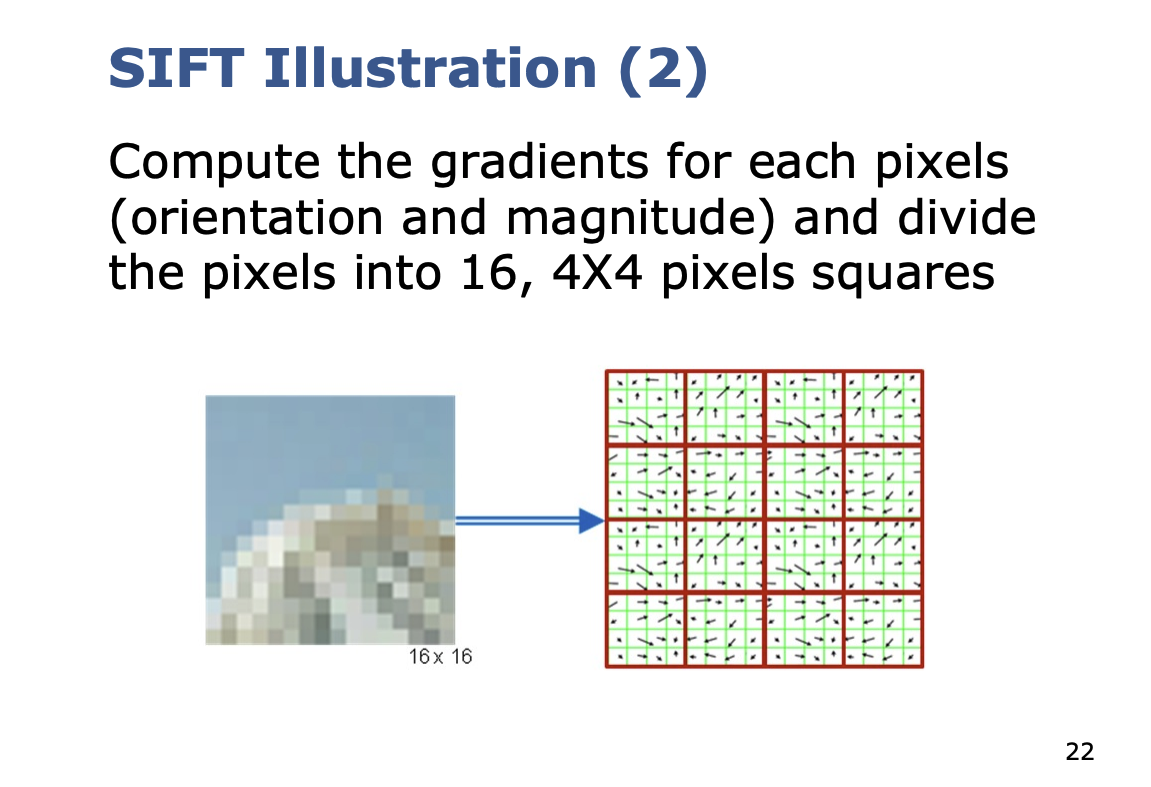
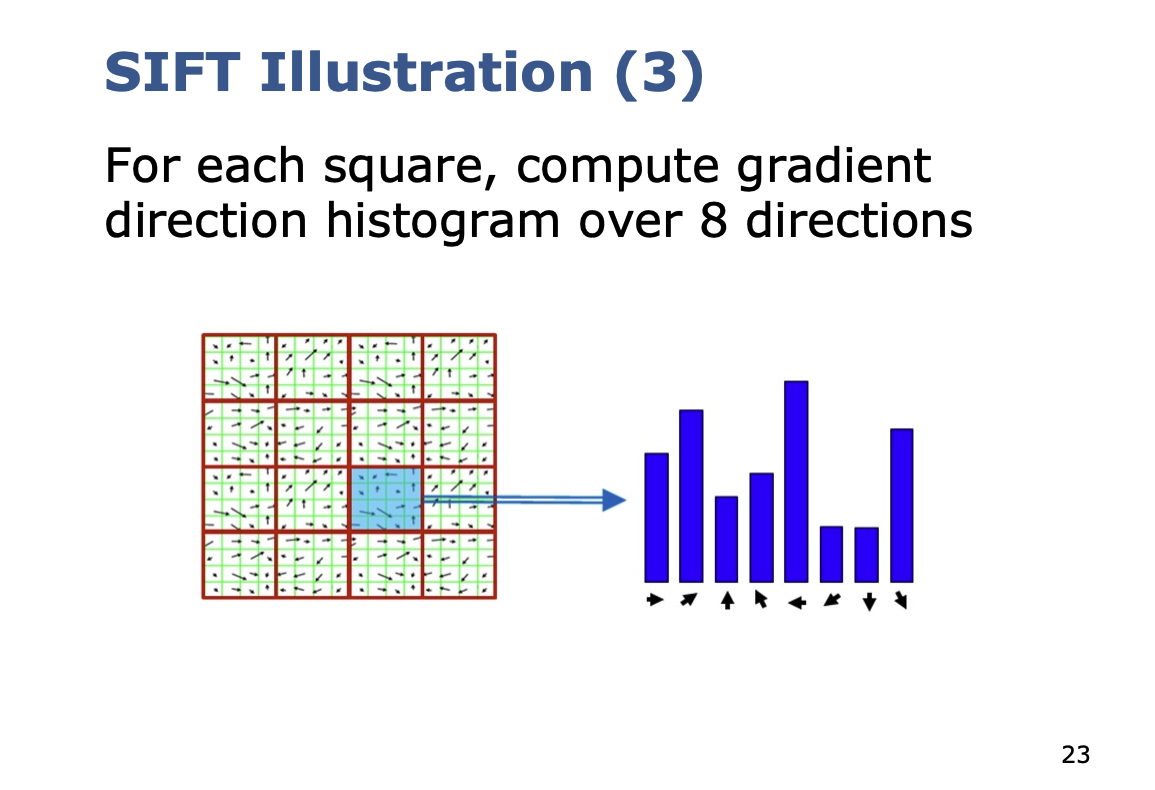
So basically, you are computing histograms of gradients, and basically flatten the histograms.
But you can sometimes have wrong data associations, such as in the example below
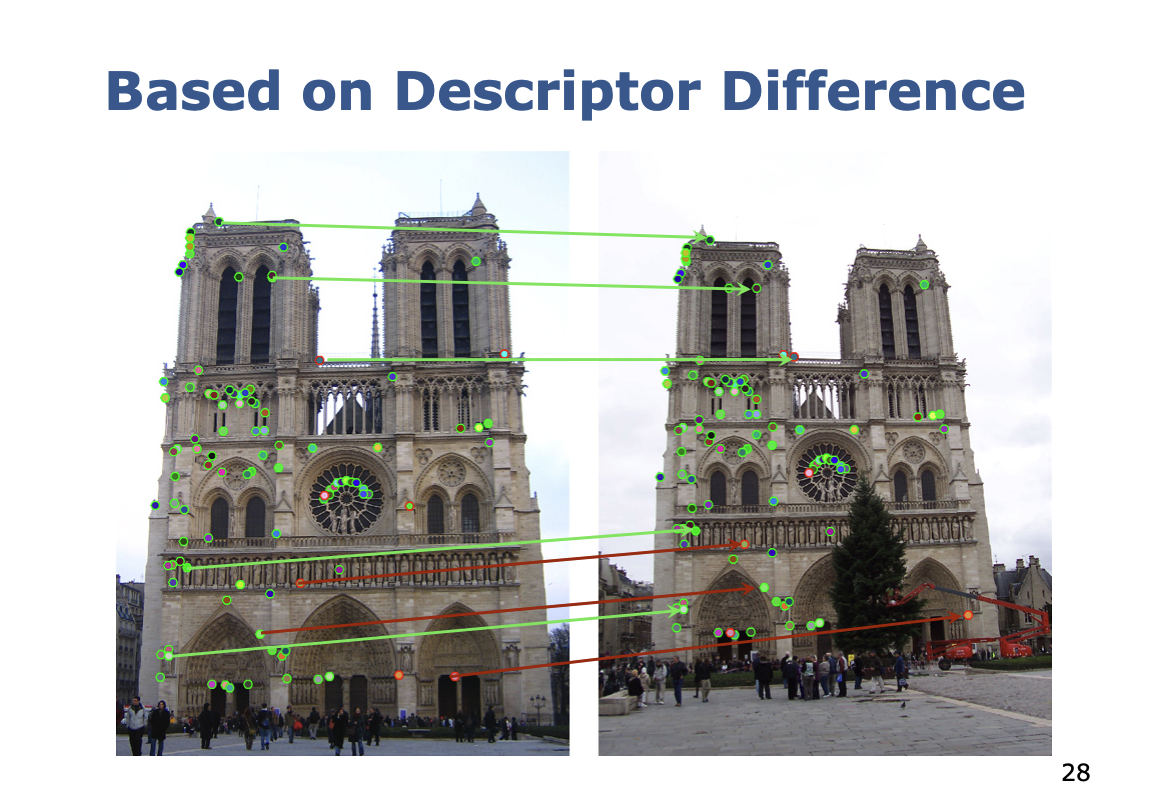
You can do a ratio test to eliminate some of the wrong measures.
3 Step test to eliminate ambiguous matches for a query feature
- Step: Find closest two descriptors to , called p1 and p2 based on the Euclidian distance
- Step: Test if distance to best match is smaller than a threshold:
- Step: Accept match only if the best match is substantially better than second:
- Lowe’s Ratio test works well
- There will still remain few outliers
- Outliers require extra treatment
Binary Descriptors
This is about computing descriptors fast.
The issue is that SIFT takes a pretty long time. SIFT are not the way to go.
- GPU implementations of SIFT exist, but it is compute heavy
Fairly simple strategy
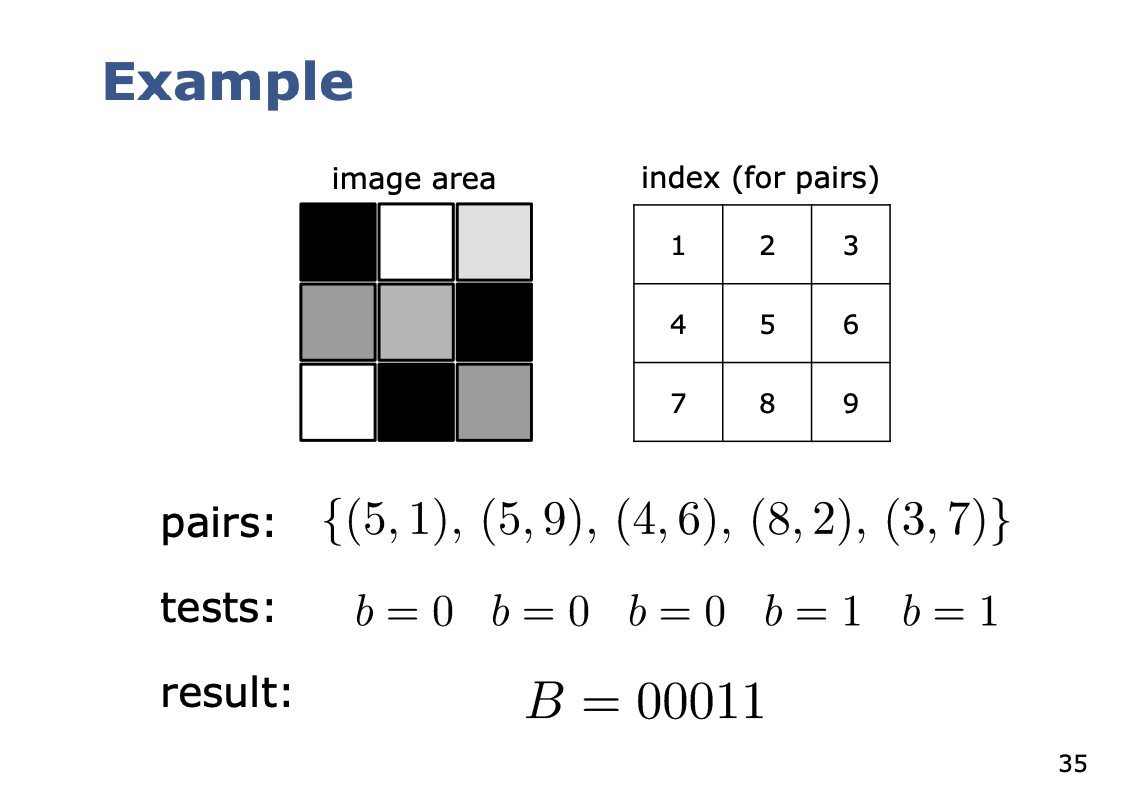
- Select a patch around a keypoint
- Select a set of pixel pairs in that patch
- For each pair, compare the intensities
- refers to the intensity of pixel
Concatenate all ’s to a bit string.
There is a simple strategy for how the pairs are chosen.
Key Advantages of Binary Descriptors
- Compact descriptor: The number of pairs gives the length in bits
- Fast to compute: Simply intensity value comparisons
- Trivial and fast to compare: Hamming Distance given by
The key thing is, how do we select which pair of strings should we choose?
Different Binary Descriptors Differ Mainly by the Strategy of Selecting the Pairs.
BRIEF : Binary robust independent elementary features
-
First binary image descriptor
-
Proposed in 2010
-
256 bit descriptor
-
So there are 256 different pairs
-
Provides five different geometries as sampling strategies
-
Noise: operations performed on a smoothed image to deal with noise
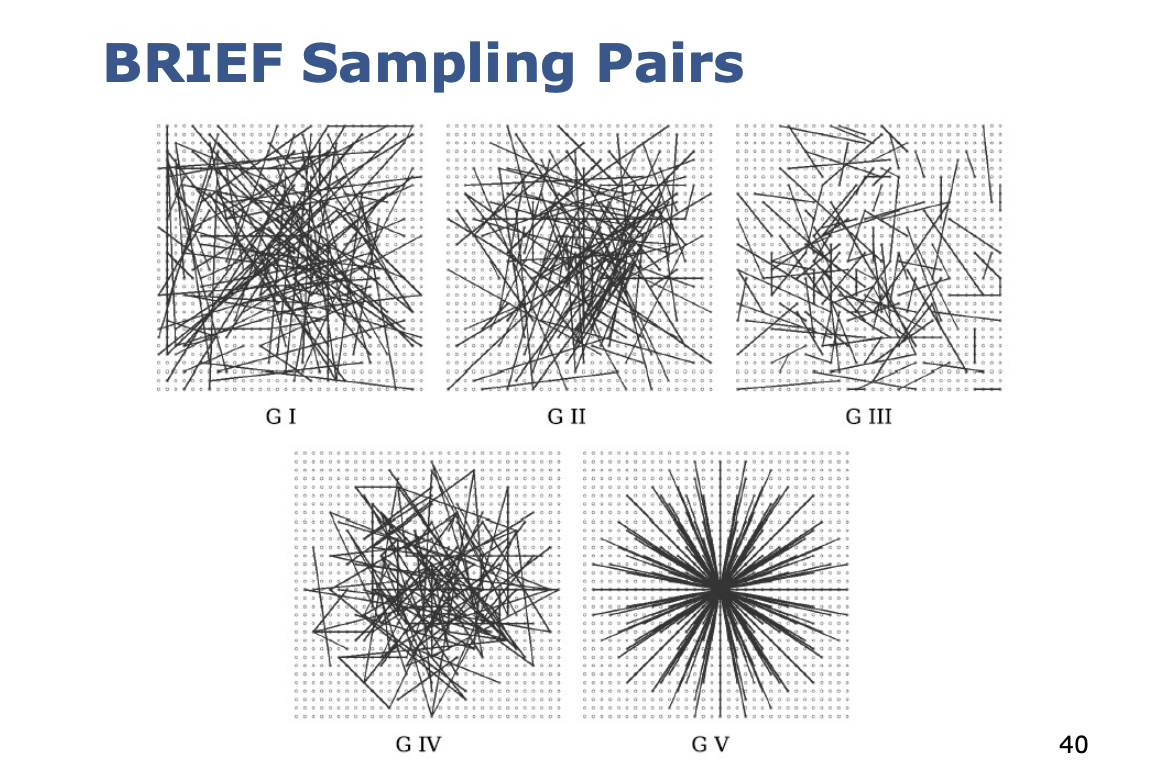
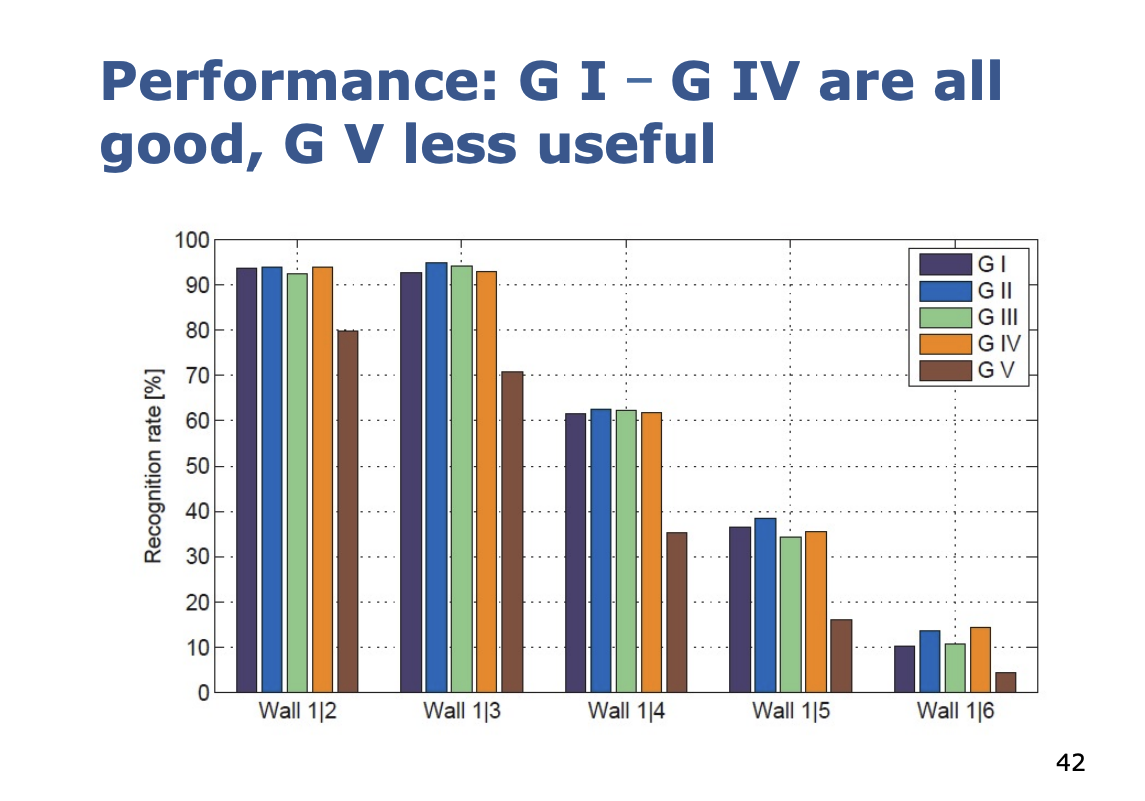
BRIEF Sampling Pairs
- G I: Uniform random sampling
- G II: Gaussian sampling
- G III: Gaussian; Gaussian centered around
- G IV: Discrete location from a coarse polar gird
- G V: ; are all location from a coarse polar grid
Now, the issue is that orientation is a problem. So we introduce ORB.
ORB: Oriented FAST Rotated BRIEF An extension to BRIEF that
- Adds rotation compensation
- Learns the optimal sampling pairs
I skipped the notes here…
ORB vs. SIFT
- ORB is 100x faster than SIFT
- ORB: 256 bit vs. SIFT: 4096 bit
- ORB is not scale invariant (achievable via an image pyramid)
- ORB mainly in-plane rotation invariant
- ORB has a similar matching performance as SIFT (w/o scale)
- Several modern online systems (e.g. SLAM) use binary features