Foxglove
Foxglove is kind of nice. On your local computer, you can download FoxGlove Studio.
Slides for using foxglove on the F1TENTH: https://docs.google.com/presentation/d/1UZ2ejFhRrJlb2t—cSl_ccmg6U-HuHm23xrV3Q09O9k/edit#slide=id.p
Foxglove is actually super widely adopted in the industry, much more adopted that what I thought.
Difference between Foxglove Bridge and Rosbridge?
Learned from Ashwin, though I am still operating at a higher level of abstraction. The Foxglove bridge is maintained by Foxglove, whereas the Foxglove Rosbridge is maintained by OSRF.
Foxglove Bridge (port 8765)
You install the foxglove bridge for ROS by running
sudo apt install ros-$ROS_DISTRO-foxglove-bridgehmm doesn’t seem to work for foxy, only galactic work
sudo apt install ros-galactic-foxglove-bridgeThen, you can start foxglove by running
ros2 run foxglove_bridge foxglove_bridgeros2 launch foxglove_bridge foxglove_bridge_launch.xmlThen, on your local computer, you do
lsof -ti:8765 | xargs kill -9
ssh -NfL 8765:localhost:8765 ubuntu@172.20.10.14For the wato servers
lsof -ti:34400 | xargs kill -9
ssh -NfL 34400:localhost:34400 s36gong@trpro-ubuntu2.cluster.watonomous.ca
The first line ensures that port 8765 is not previously occupied, if so it kills that process.
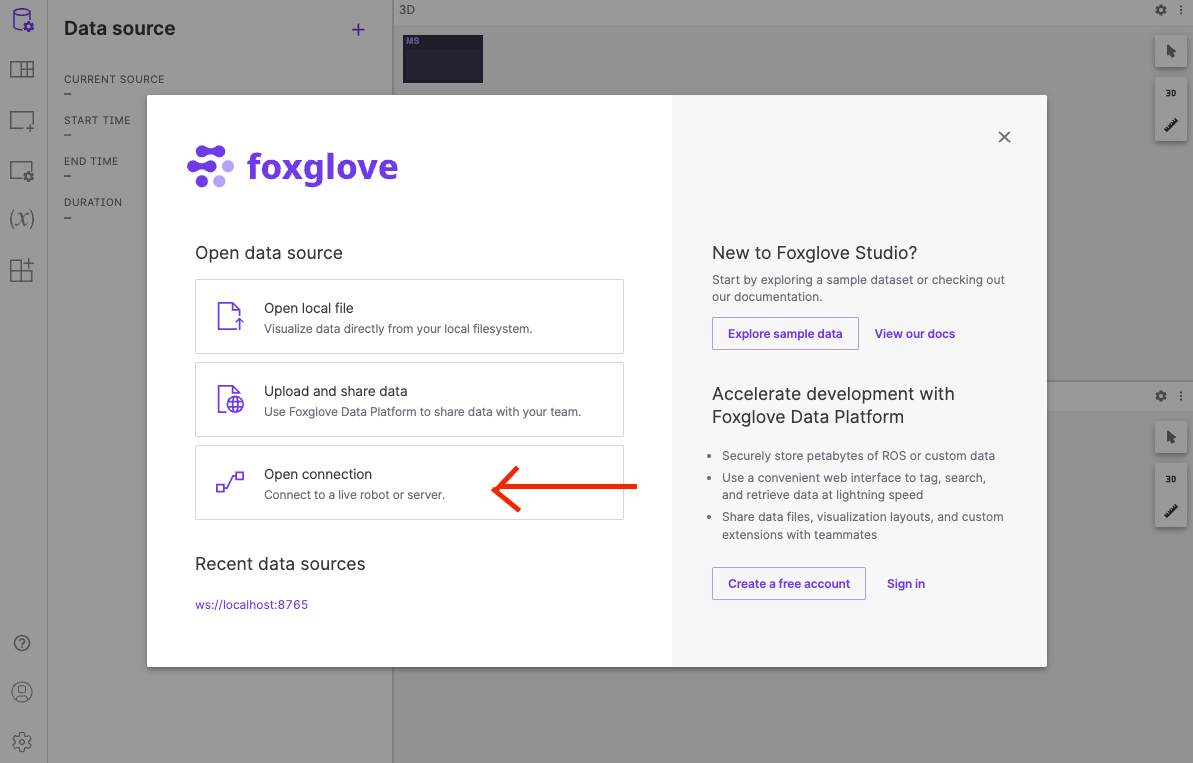
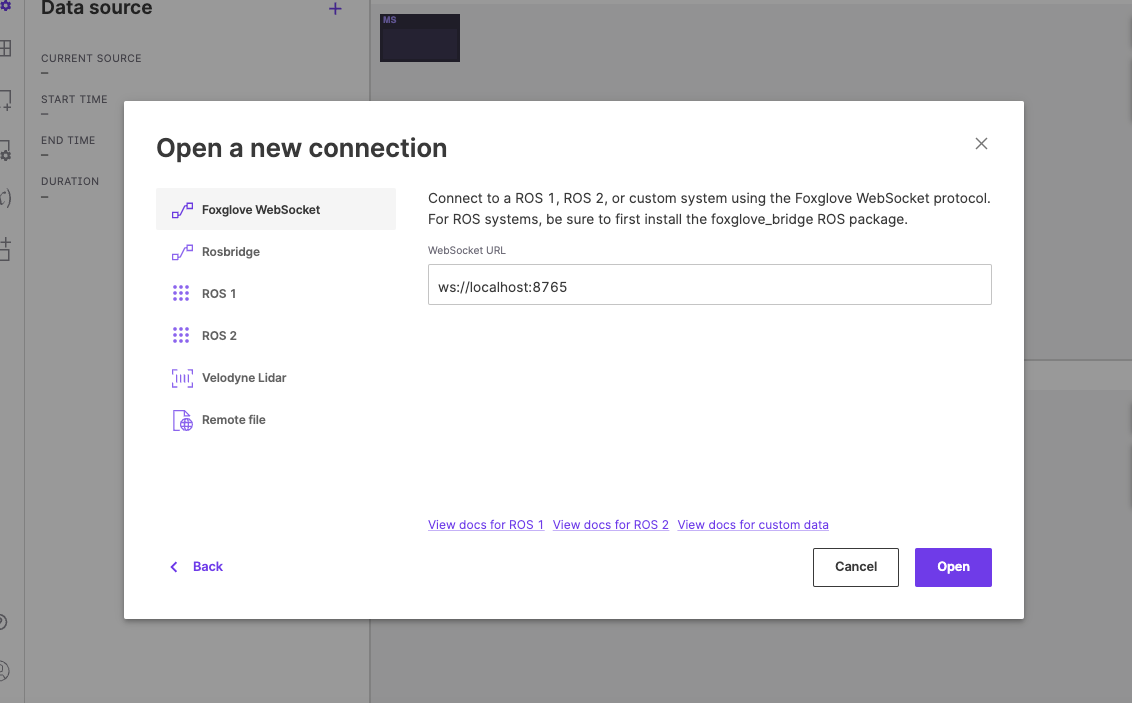
You can then open up Foxglove on your computer, and then select “Open Connection”.
Use the Websocket URL ws://localhost:8765 and then click “Open”.
Then, in a new terminal, SSH into the Raspberry Pi again, and run the following command to drive the robot around with your keyboard:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
WATonomous
You need to use the vis_tools container. See README.
lsof -ti:8765 | xargs kill -9
ssh -NfL 8765:localhost:8765 s36gong@trpro-ubuntu1.watocluster.localFoxglove Rosbridge (Port 9090)
Check these commands, since I don’t seem to be able to install foxglove bridge on foxy anymore. https://github.com/JChunX/foxglove-onboard
sudo apt-get install ros-$ROS_DISTRO-rosbridge-suiteFor my simulation:
- connect to remote
lsof -ti:9090 | xargs kill -9
ssh -NfL 9090:localhost:9090 s36gong@thor-ubuntu1.watocluster.localFor the real physically car
lsof -ti:9090 | xargs kill -9
ssh -NfL 9090:localhost:9090 f1tenth-uw@10.42.0.1ssh -NfL 9090:localhost:9090 f1tenth-uw@192.168.0.115
- launch
ros2 launch rosbridge_server rosbridge_websocket_launch.xml
Didn’t get it quite to work yet.