Robot Joint
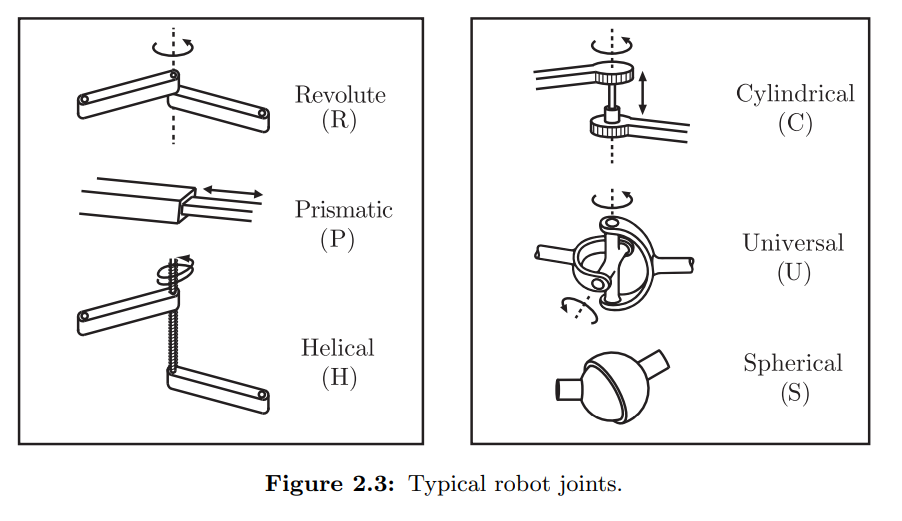
There are six basic types of robot joints.
A 0-DOF joint is called the Fixed Joint , where the child link is rigidly connected to the parent link.
1-DOF Joints:
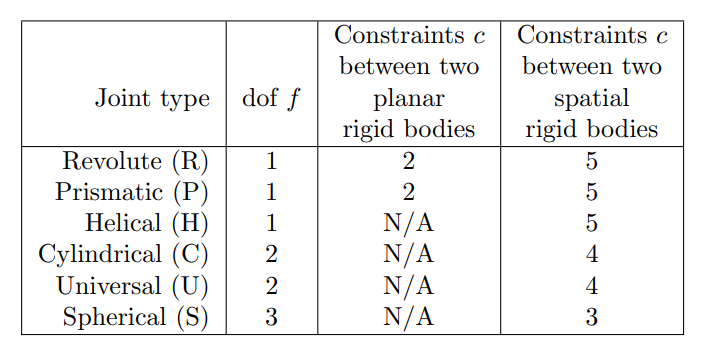
- The revolute joint (R), also called a hinge joint, allows rotational motion about the joint axis
- Rotational motion with no limit is called a Continuous Joint
- The prismatic joint (P), also called a sliding or linear joint, allows translational (or rectilinear) motion along the direction of the joint axis
- The helical joint (H), also called a screw joint, allows simultaneous rotation and translation about a screw axis.
Multiple DOF Joints:
- The cylindrical joint (C) has two DOF and allows independent translations and rotations about a single fixed joint axis
- The universal joint (U) is another two-DOF joint that consists of a pair of revolute joints arranged so that their joint axes are orthogonal
- The spherical joint (S), also called a ball-and-socket joint, has three DOF and functions much like our shoulder joint.
ROS
In ROS, you can specify these joints in the URDF. Each joint will need to have the following specified (Source):
- Name - A name for the joint. If we don’t have this, some things will still work, but other things won’t. It’s good to name them all just in case.
- Type - The joint type as mentioned earlier (the four most popular being
fixed,prismatic,revolute, andcontinuous). - Parent and child links - Which links this joint defines a relationship between
- Origin - The relationship between the two links, before any motion is applied
Related
- [[notes/Degrees of Freedom#Grubler’s Formula|Degrees of Freedom#Grubler’s Formula]]