Stanley Method
Daniel Chia introduced this method to me.I implemented the Stanley controller, and it’s so much better at Path Tracking than Pure Pursuit.
Links
- Short video intro by UofT prof https://www.youtube.com/watch?v=9Y7kVIJs_JI&ab_channel=TaHaiDang
- http://ai.stanford.edu/~gabeh/papers/hoffmann_stanley_control07.pdf
- http://robots.stanford.edu/papers/thrun.stanley05.pdf
Implementation
Why is Stanley Method superior to Pure Pursuit?
Stanley takes path curvature into error correction. This is why Stanley control is better suited for higher speed driving when compared to Pure Pursuit.
With Pure Pursuit, you are only considering a single point ahead of you, and computing a curvature path to reach that point (NO alignment with target trajectory).
However, with Stanley Method, you compute the heading of the target trajectory. So you compare you car’s heading with the heading of the target trajectory.
This way, you get better stability guarantees. As opposed to oscillating back and forth.
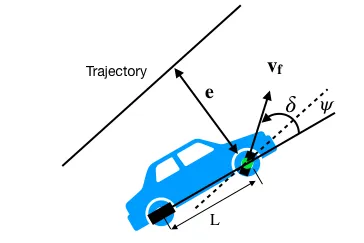
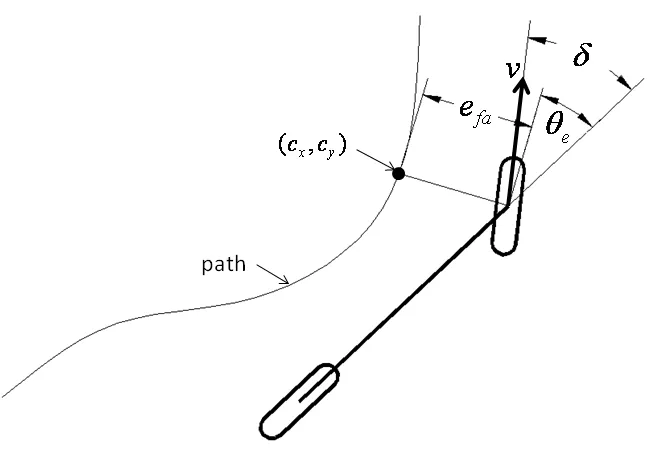
The equation is given by where
- is the steering angle
- is the heading error
- is the crosstrack error
- is the gain for the crosstrack error
My implementation:
...
def drive_to_target_stanley(self):
"""
Using the stanley method derivation.
Might get the best out of both worlds for responsiveness, and less oscillations.
"""
# calculate curvature/steering angle
closest_wheelbase_front_point_car, closest_wheelbase_front_point_world = self.pure_pursuit.get_waypoint_stanley(self.current_pose_wheelbase_front)
path_heading = math.atan2(closest_wheelbase_front_point_world[1] - self.closest_wheelbase_rear_point[1], closest_wheelbase_front_point_world[0] - self.closest_wheelbase_rear_point[0])
current_heading = math.atan2(self.current_pose_wheelbase_front.position.y - self.current_pose.position.y, self.current_pose_wheelbase_front.position.x - self.current_pose.position.x)
if current_heading < 0:
current_heading += 2 * math.pi
if path_heading < 0:
path_heading += 2 * math.pi
# calculate the errors
crosstrack_error = math.atan2(self.K_E * closest_wheelbase_front_point_car[1], self.target_velocity) # y value in car frame
heading_error = path_heading - current_heading
if heading_error > math.pi:
heading_error -= 2 * math.pi
elif heading_error < - math.pi:
heading_error += 2 * math.pi
heading_error *= self.K_H
# Calculate the steering angle using the Stanley controller formula
angle = heading_error + crosstrack_error
angle = np.clip(angle, -np.radians(self.steering_limit), np.radians(self.steering_limit))
velocity = self.target_velocity * self.velocity_percentage