Co-Visibility Graph
Apparently they use this in ORB-SLAM 2. The SLAM textbook talks about this.
This seems to be the original paper that introduced this idea:
- Double window optimisation for constant time visual SLAM
- available locally here
This paper talks about the many ways that are leveraged to have BA run in real-time:
- Active Window
- taking a subset of the last windows
- Relative representation
- Pose-pose reduction (Pose Graph Optimization)
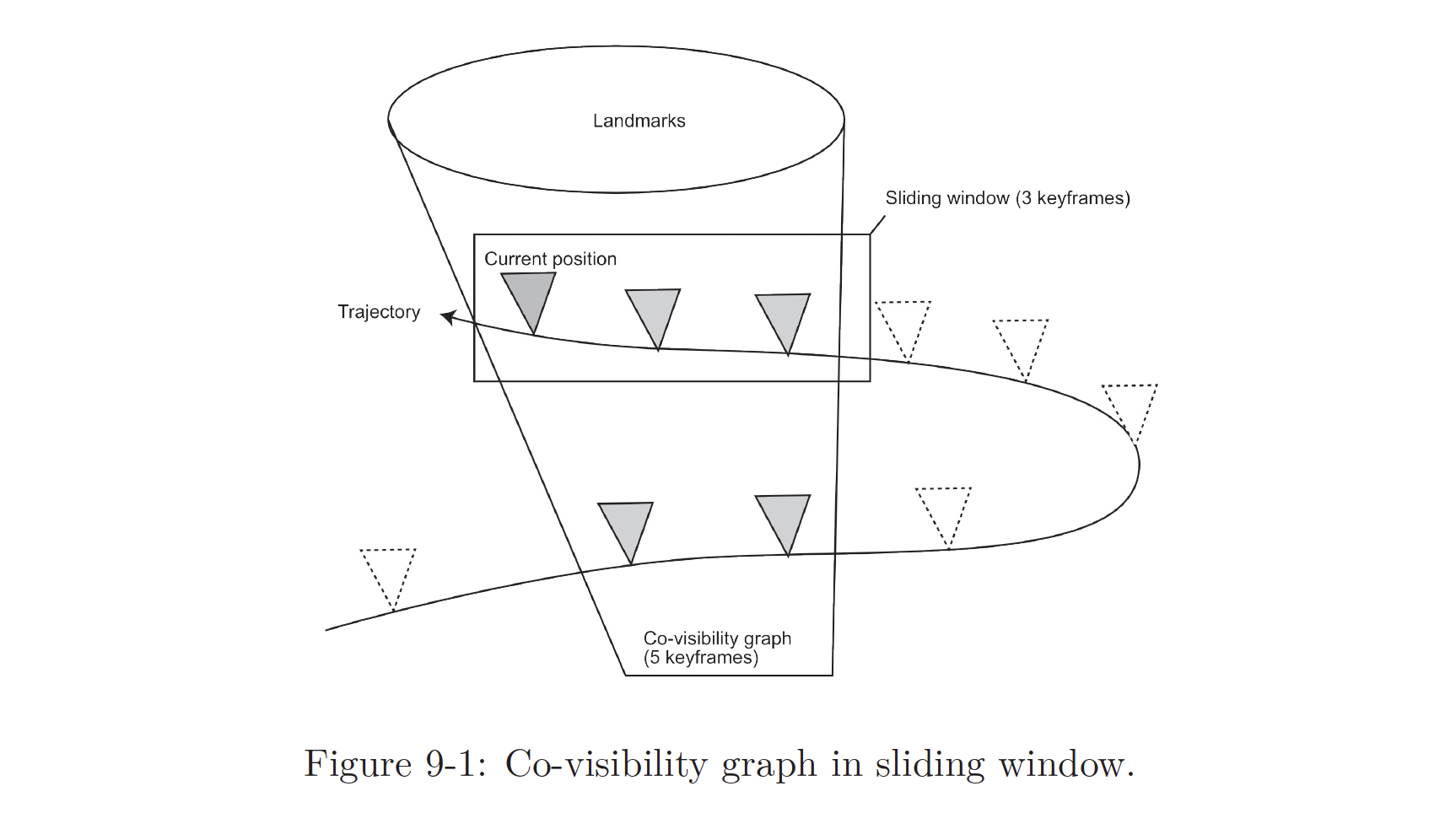
Co-visibility refers to those features that are observed together with the current keyframe). Therefore, in BA optimization, we take some keyframes and landmarks in the co-visibility graph to optimize.