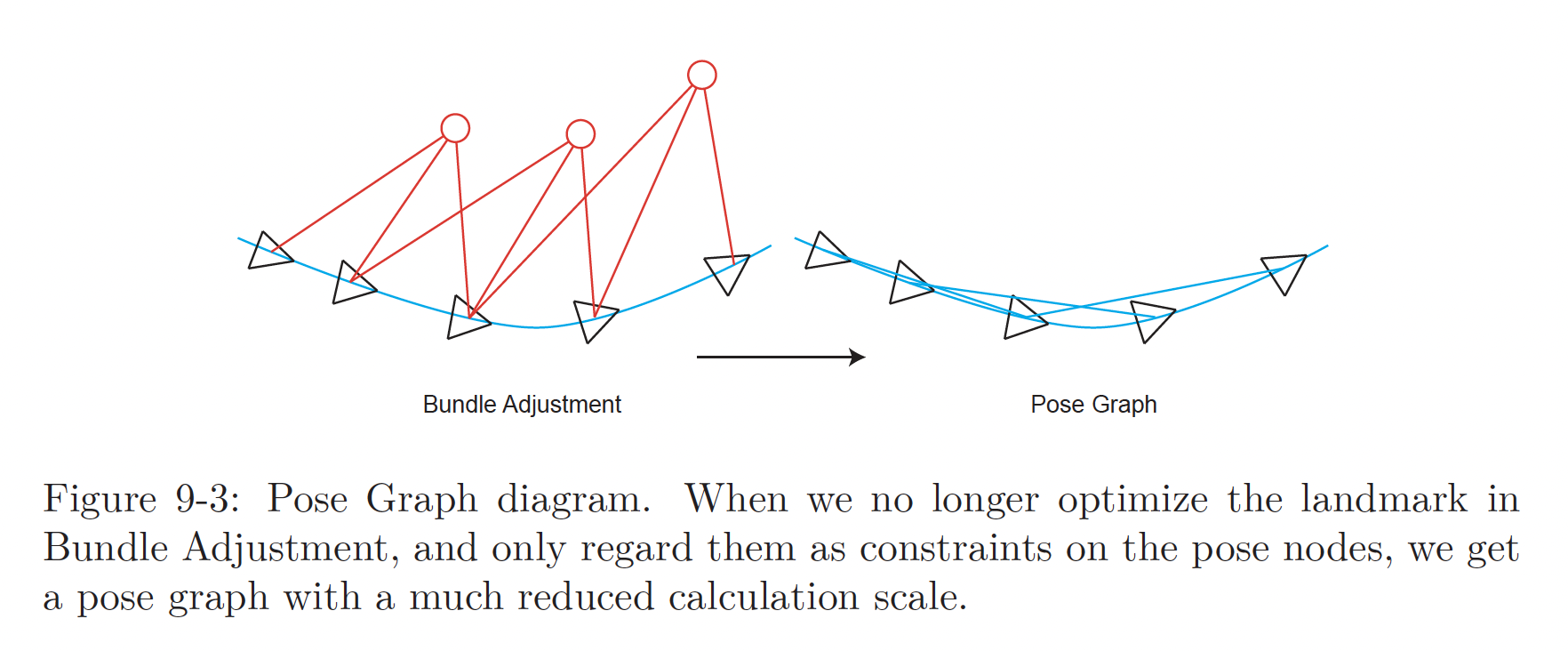
Pose Graph Optimization
In pose graph optimization, we discard the landmarks and only focus on optimizing over the poses.
These heavily rely on the Loop Closure to work well.
Graph Optimization, Pose Graph Optimization and Bundle Adjustment?
I thought these 3 terms were used interchangeably, but really not.
In practice, how is the pose graph used?
- Aren’t we using the landmarks as well?
So like in ORB-SLAM, they don’t do pose graph optimization. They do full graph optimization, with both the poses and landmarks being optimized at the same time.
Ahh yes, you actually don’t need to optimize over the landmarks. You can simply have those expressed as relationships between edges (think of collapsing the vertex).
- This way, there are much less variables to optimize
However, how do we express those new relationships?
Chapter 9
See Chapter 9 of the SLAM Textbook.
I actually don’t understand this. Check the Chapter 9.3.
Relation to Loop Closure
When you have loop closure, you just add a new edge to the graph to close the loop!! And the graph will sort of close on itself!