Dead-Zone
Introduced to me by Professor Pant.
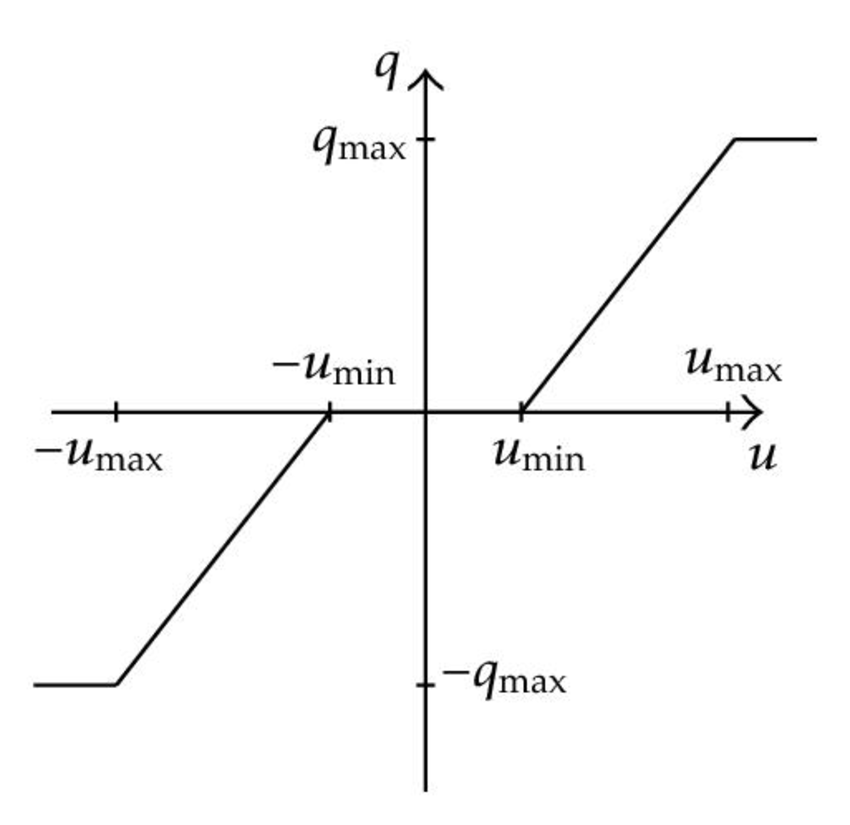
A dead-zone is a kind of non linearity in which the system doesn’t respond to the given input until the input reaches a particular level or it can refer to a condition in which output becomes zero when the input crosses certain limiting value.
I was running into this problem with F1TENTH, because the system is interpreting it as a linear system, when actually it is a deadzone.
I thought you can just fix the PID Tuning to make the system linear, but it is not always possible, and it can be quite hard if you really try to do that.
Think about how sometimes, there is dirt, so for the car to actually move, there necessarily is a delay. Like the minimum power to make something move.
The way to account for this is to just account for the deadzone in your system.
Else, the system is going to interpret that this system is in movement (because it thinks the system is linear when it isn’t).