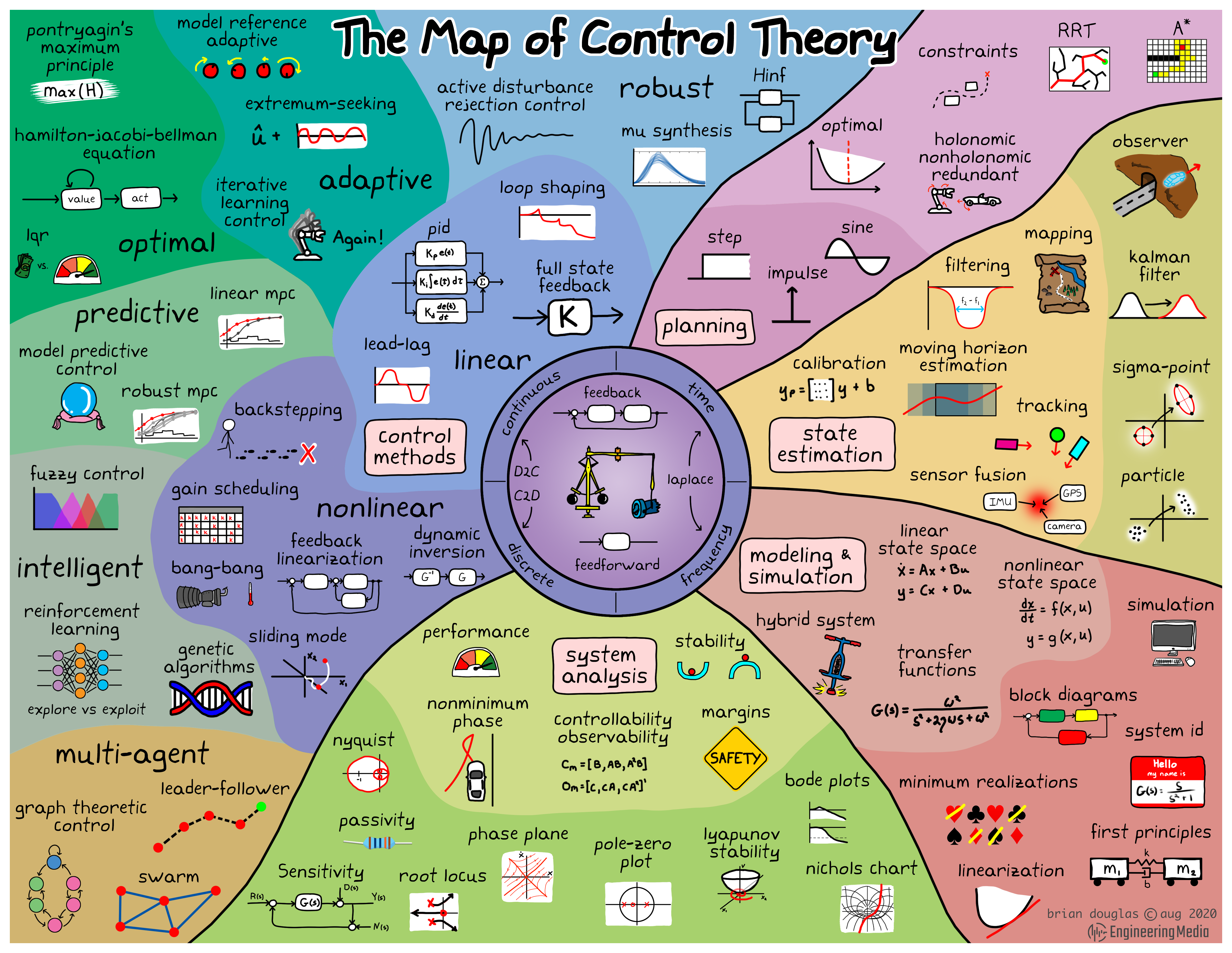
Control Theory
Personal Opinion: I think a lot of the problems that you can solve with Control Theory, you can solve with RL nowadays? Like balancing a pendulum. However, it’s much harder to obtain guarantees.
 https://github.com/A-make/awesome-control-theory
https://github.com/A-make/awesome-control-theory
Resources:
Concepts
What is a system?
A system is a collection of interconnected parts that form a larger more complex whole.
Engineering projects are very complex, so we break them into smaller chunks to simplify the problem.
graph LR;
inputs-->system --> outputs;
1.2. The Three Different Problems
1.2.1.The system identification problem
In real life, we are not always given a model of our system, so we need to determine it ourselves.
Black box method (find the relationship between the step input and the squiggly output) White box method (write the mathematical equations of the dynamics directly)
1.2.2. The simulation problem
inputs --> system --> ?
1.2.3. The Control Problem
? --> system --> outputs
1.3. Why do we need a feedback control system?
controller - converts a commanded variable into appropriate actuating signals process - system being controlled actuator - device/motor that is responsible for controlling a system.
Types of Control Systems
Open-loop control system: The inputs into the controller are not fed back from the output of the process. Ex: Dishwasher
graph LR;
controller --> actuator --> process;
Closed-loop/Feedback control system: Contrary to open-loop, we accept that disturbances and process variations are going to influence the controlled variable. We add a sensor that will measure the controlled variable and pass it along to our controller. We generate an error term, and the goal is the drive the error term to zero. #TODO: Insert graph
1.4. What is a control system?
A control system is a mechanism that alters the behavior (or the future state) of a system such that its future behavior tends towards a state that is desired.