Direct Linear Transform (DLT)
DLT is a method to estimate the camera intrinsics and extrinsics. Learned from Cyrill Stachniss.
Resources
- Direct Linear Transform for Camera Calibration and Localization (Cyrill Stachniss)
- Slides here
- Short 5 minute explanation by Cyrill
First, be familiar with Camera Calibration.
How many points are needed?
Calibrated camera
- 6 unknowns ()
- We need at least 3 points
- Problem solved by Spatial Resection
Uncalibrated camera
- 11 unknowns ()
- We need at least 6 points
- Assuming the model of an affine camera
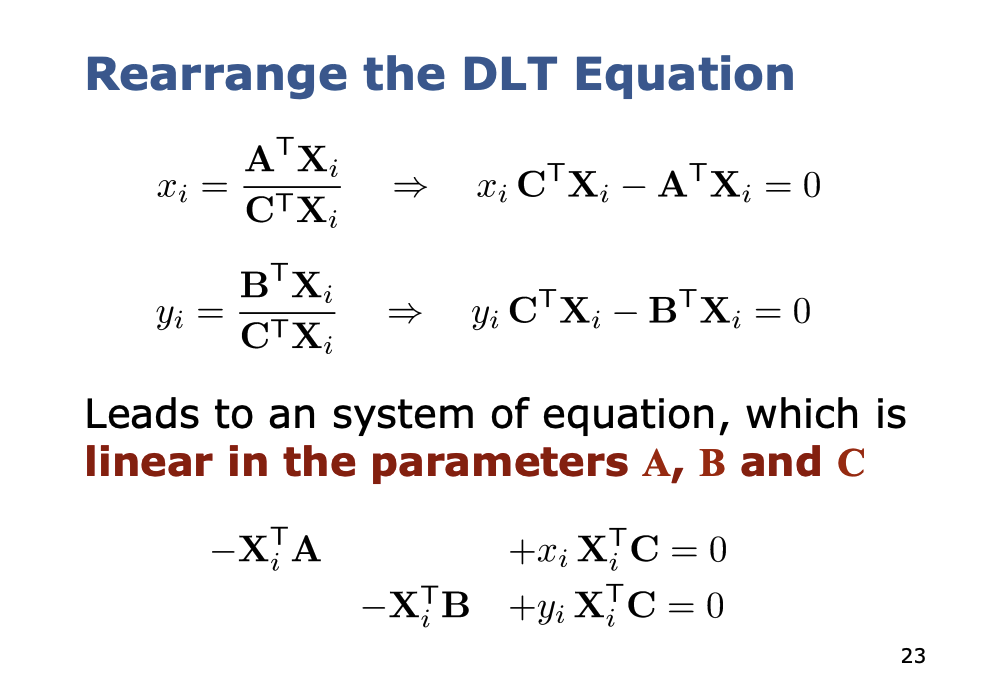
- Problem solved by DLT
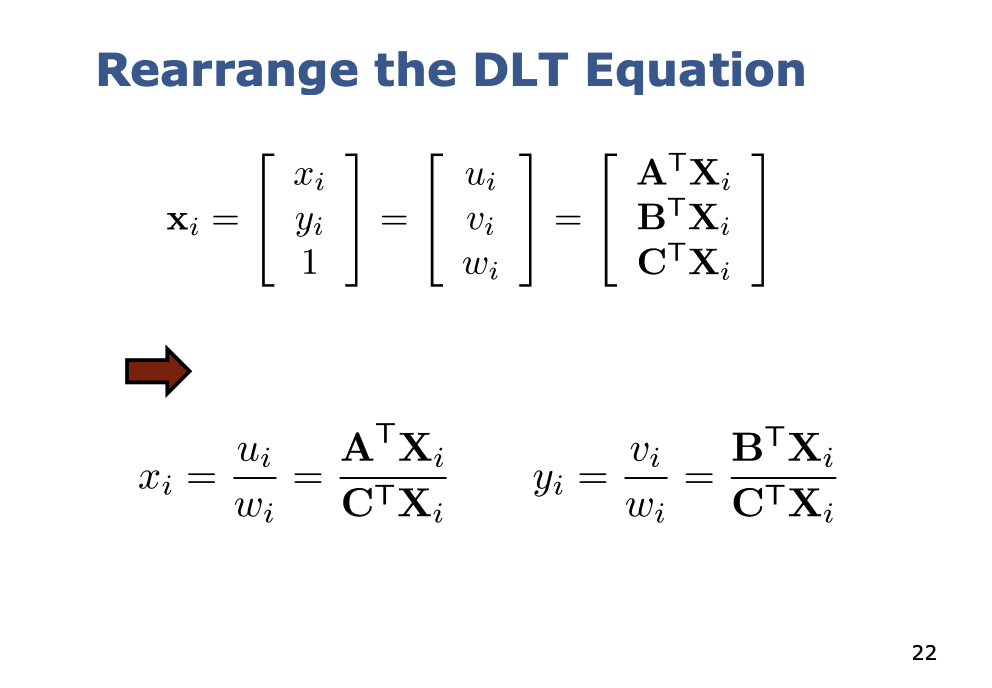
Solving for
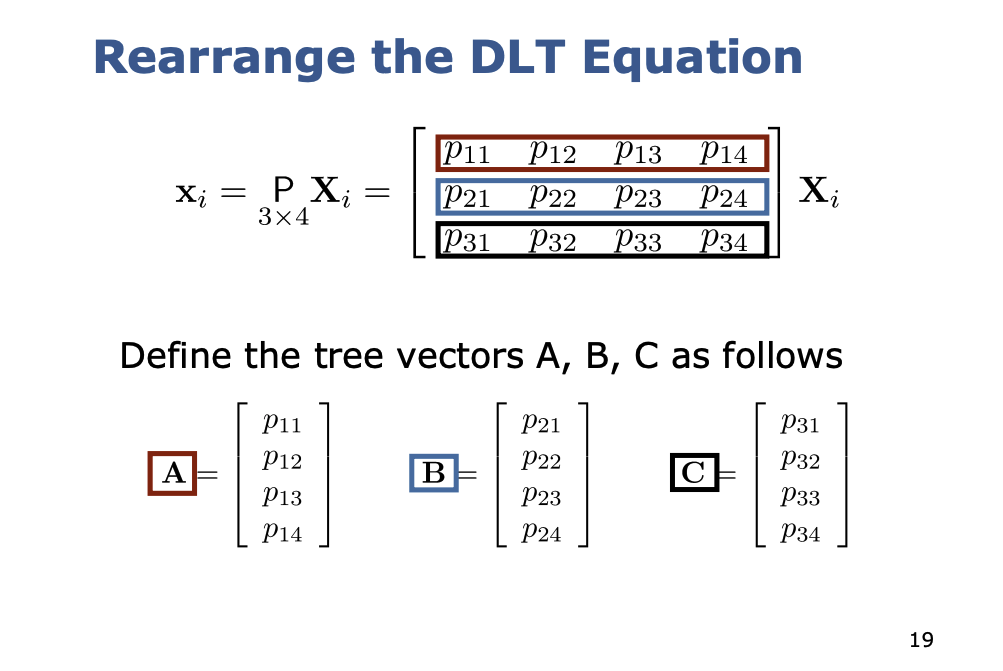
Decomposition of into
We need to do Matrix Decomposition, through QR decomposition.
Related
- Spatial Resection for Calibrated Camera