Linear Time-Invariant System (LTI)
This is a Linear System that is a Time-Invariant. Learned in MATH213.
LTI is important because the frequency won’t change from the input to output
- https://www.youtube.com/watch?v=_eh1conN6YM while learning about Bode Plot
Theorem 1
The response of an LTI system is the convolution of the input with the system’s Impulse Response.
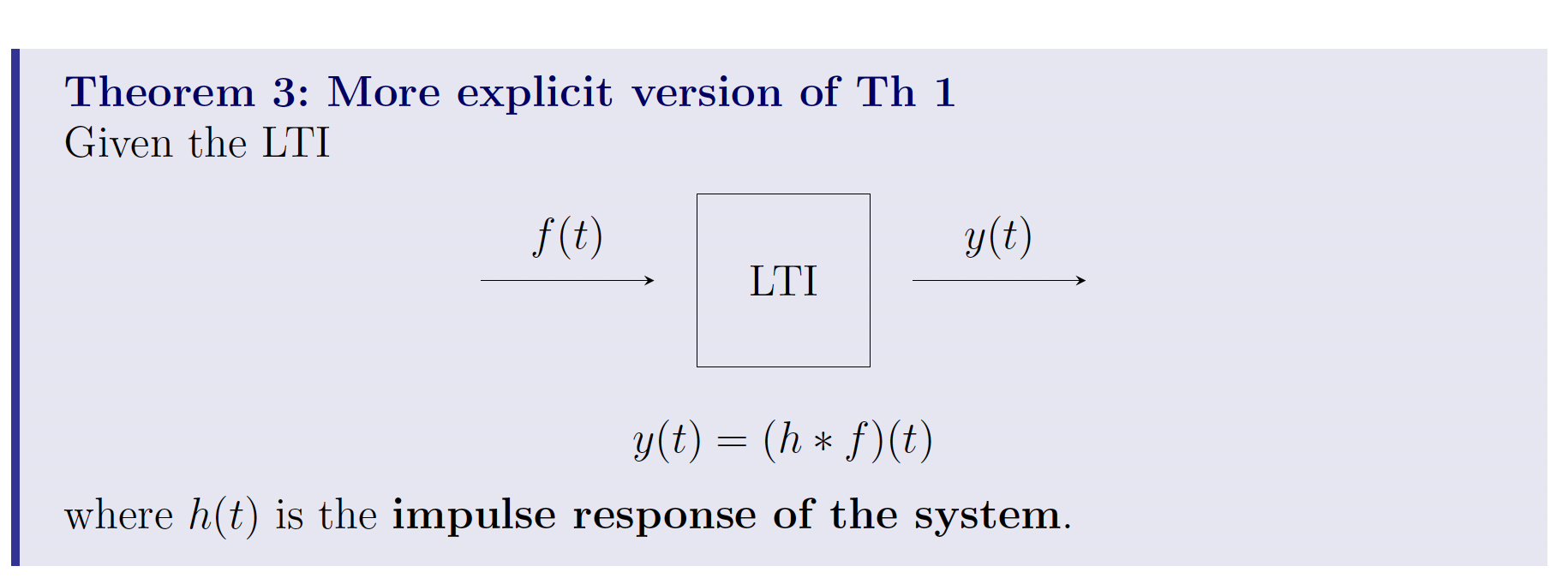
where
- is the Response (output)
- is the Impulse Response of the system
- is the forcing term
Theorem 4: LTI response to an exponential
If is a LTI then for any
is the LT of the system’s impulse response and is called the system’s transfer function.
Note this means that complex exponentials are the eigenfunctions of LTIs and the transfer function tells you the eigenvalues of the system! (like with DEs).
LTI Allowable Operations
These are older notes from when I self-learned Control Theory.
multiply or divide the input by a constant or
Integrate or differentiate the input or
Add or subtract multiple inputs or
If you can model your system with some combination of these six operations, then you can make assertions about how the output of the system will change based on changes to the input.
LTI Properties
All LTI systems have the following properties: homogeneity, superposition, and time-invariance.
See Linear System → Homogeneity, superposition
Time-invariance: “The system behaves the same regardless of when in time the action takes place”.