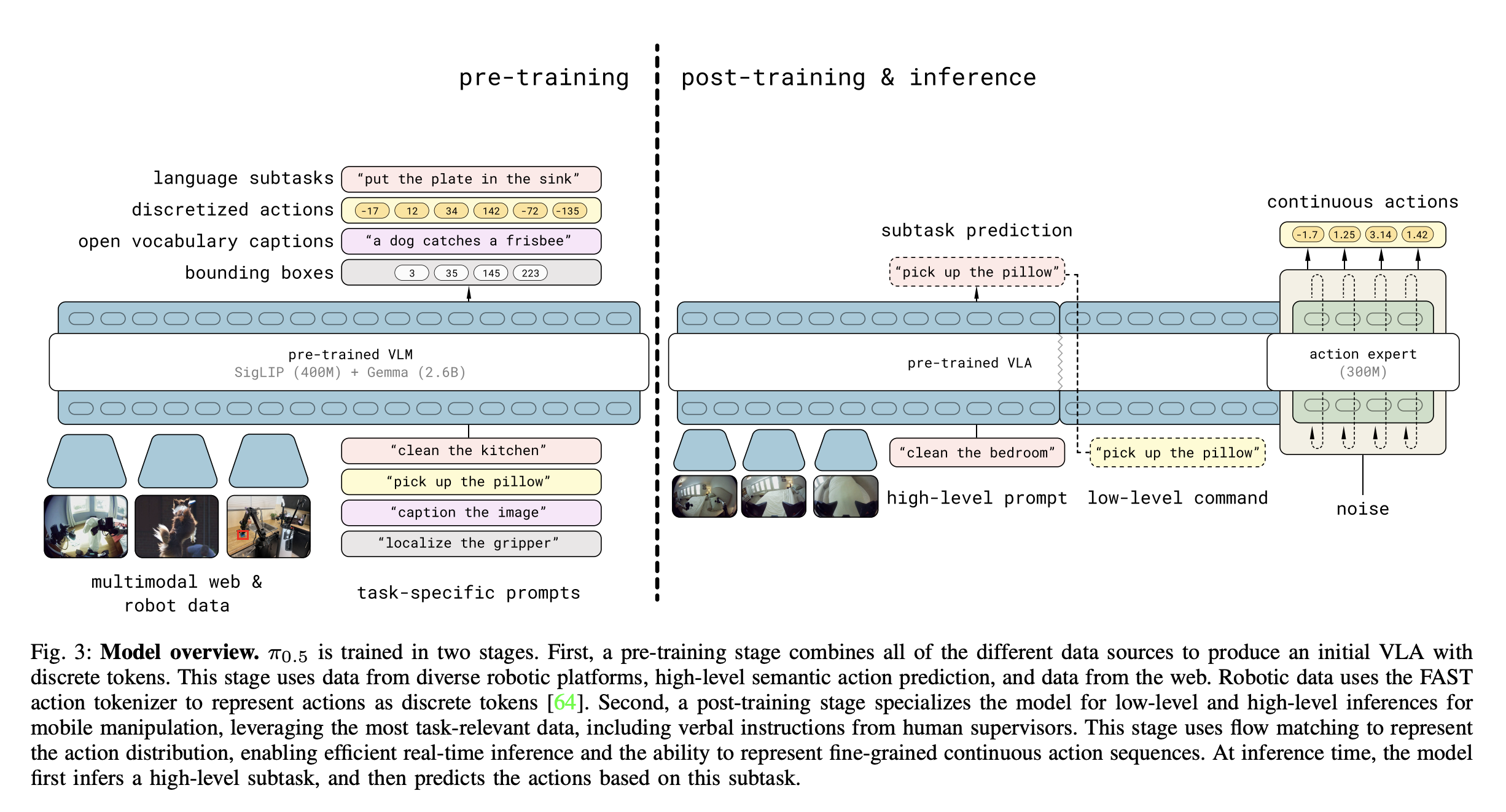
pi0.5
“How can we enable better generalization?” - By training on many surrogate tasks
Training in Lerobot
python src/lerobot/scripts/lerobot_train.py \
--dataset.repo_id=Gongsta/koch-tshirt-folding-v3 \
--dataset.video_backend=pyav \
--policy.type=pi05 \
--output_dir=./outputs/pi05_training \
--job_name=pi05_training \
--policy.repo_id="Gongsta/pi05-koch-tshirt" \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=true \
--policy.dtype=bfloat16 \
--policy.freeze_vision_encoder=false \
--policy.train_expert_only=false \
--steps=6000 \
--save_freq=2000 \
--policy.device=cuda \
--batch_size=32 \
--num_workers=4
python src/lerobot/scripts/lerobot_train.py\
--dataset.repo_id=Gongsta/koch-tshirt-folding-v3 \
--policy.type=pi05 \
--output_dir=./outputs/pi05_training \
--job_name=pi05_training \
--policy.repo_id="Gongsta/pi05-koch-tshirt" \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=true \
--policy.dtype=bfloat16 \
--policy.freeze_vision_encoder=false \
--policy.train_expert_only=false \
--steps=6000 \
--save_freq=2000 \
--policy.device=cuda \
--batch_size=32