Coordinate System
This was focused on heavily for ECE106, and also learned in MATH119.
See [[notes/Differentials#Differential Length Element|Differentials#Differential Length Element]]
See Coordinate Frame if you’re referring for robotics.
Cartesian Coordinate
Cartesian coordinates are defined by 3 vectors with directions given by .
In math, we use .
in terms of the coordinate system will be given as:
where is the distance you move in 𝑥̂ direction, is the distance you move in 𝑦̂ direction and is the distance you move in direction. [[notes/Differentials#Differential Surface Elements|Differentials#Differential Surface Elements]]
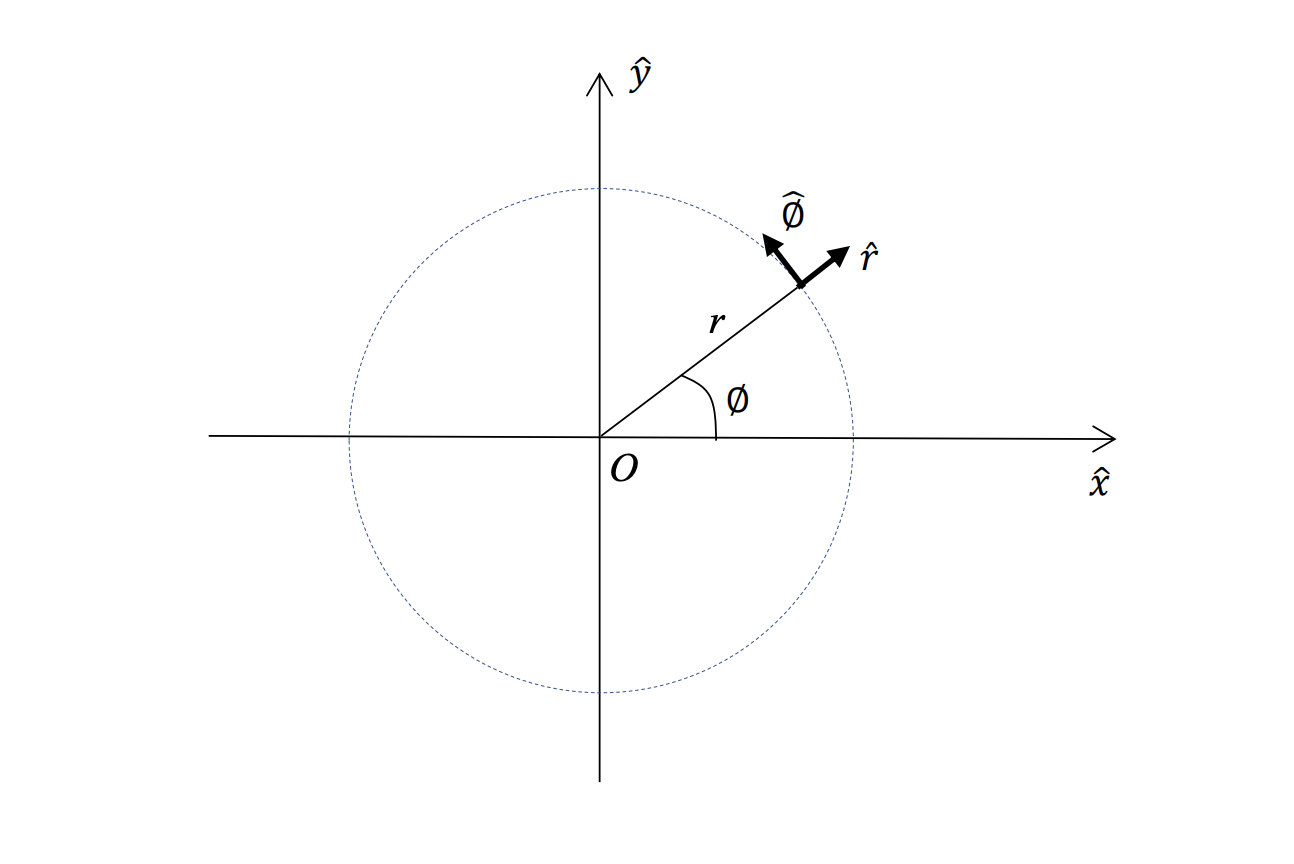
Polar Coordinates
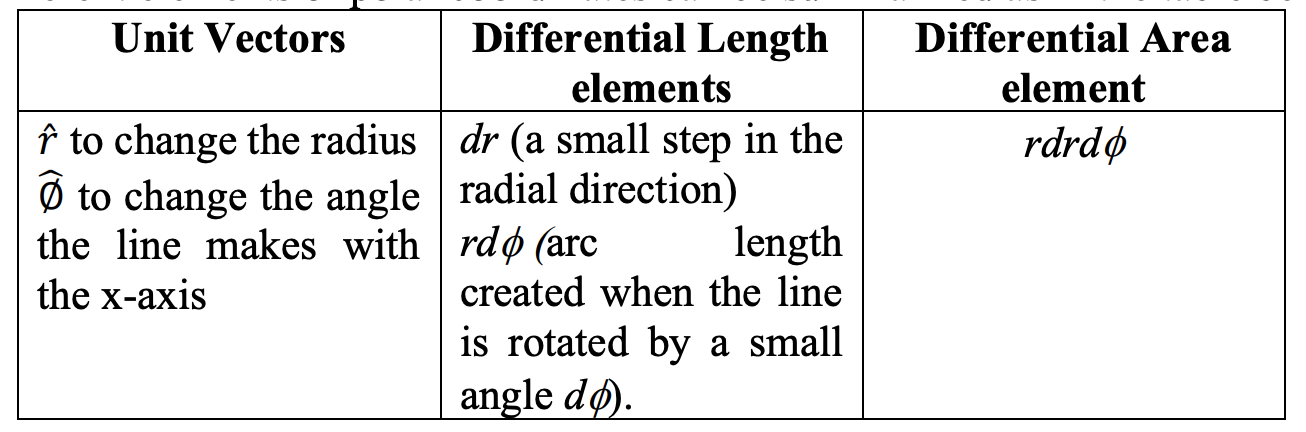
We have two vectors which define the polar coordinates, vector 𝑟̂ which changes the radius of the compass and vector which changes the angle . is perpendicular to (and is thus, orthogonal) and by conventions changes the angle counter-clockwise. is called the azimuthal vector.
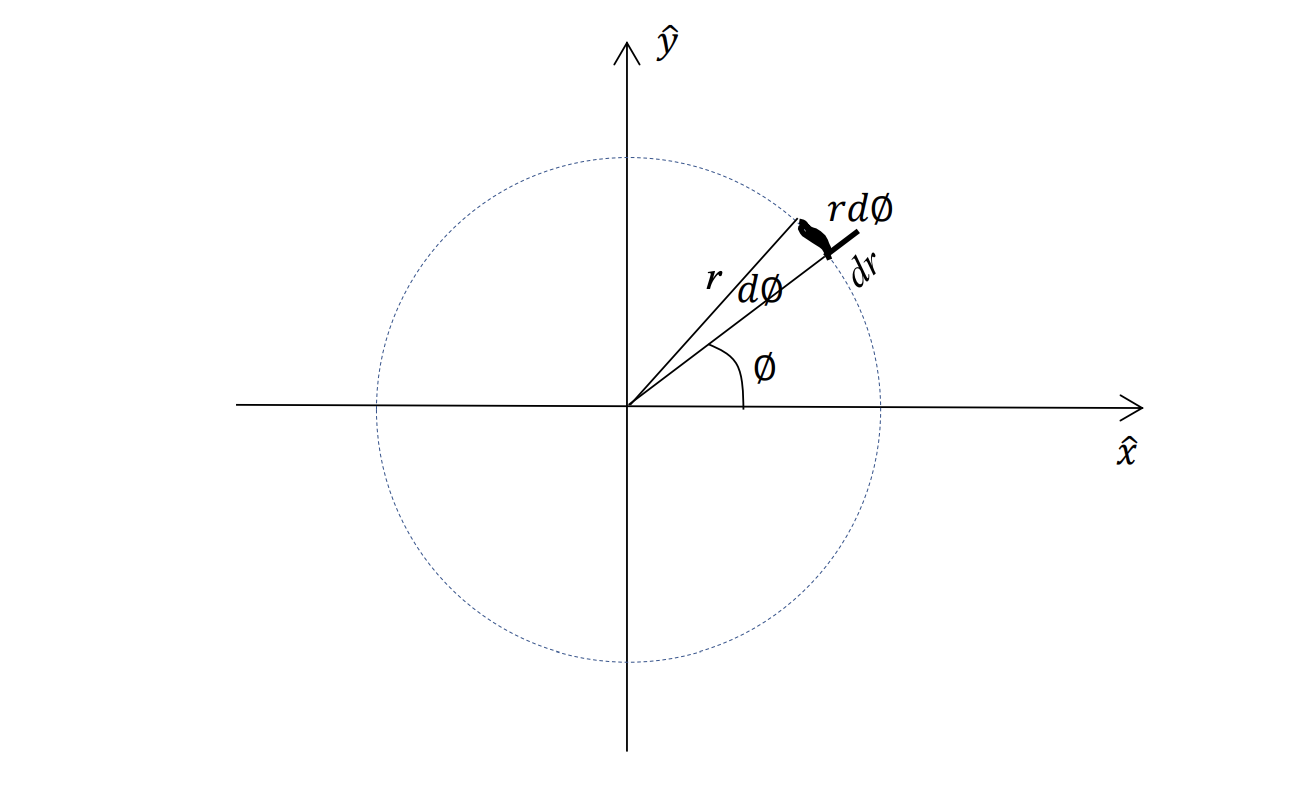
Intuition for Polar Coordinate
I get confused easily because there is an extra in for the differential area element, compared to cartesian coordinates which only has .
This is because the area, one of them is , and the arc is given by , NOT , is just an angle.
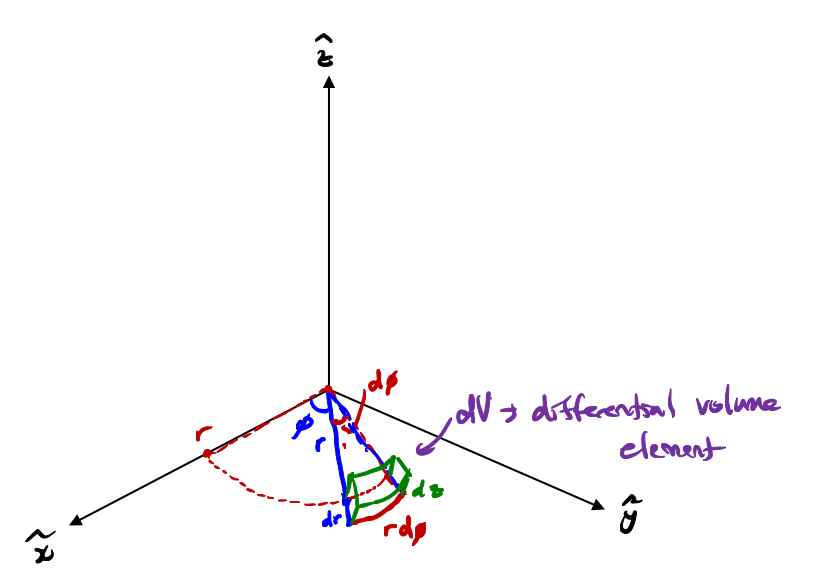
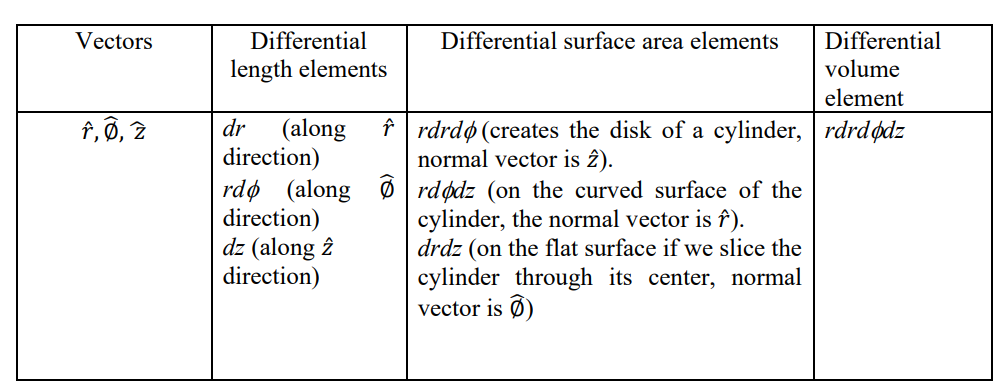
Cylindrical Coordinate
Cylindrical coordinates are basically polar coordinates in 3D.
We follow the left-hand rule and thus, is the first vector, is the second vector and is the third vector.
Conversion from Cartesian to Polar Coordinates
We simply let
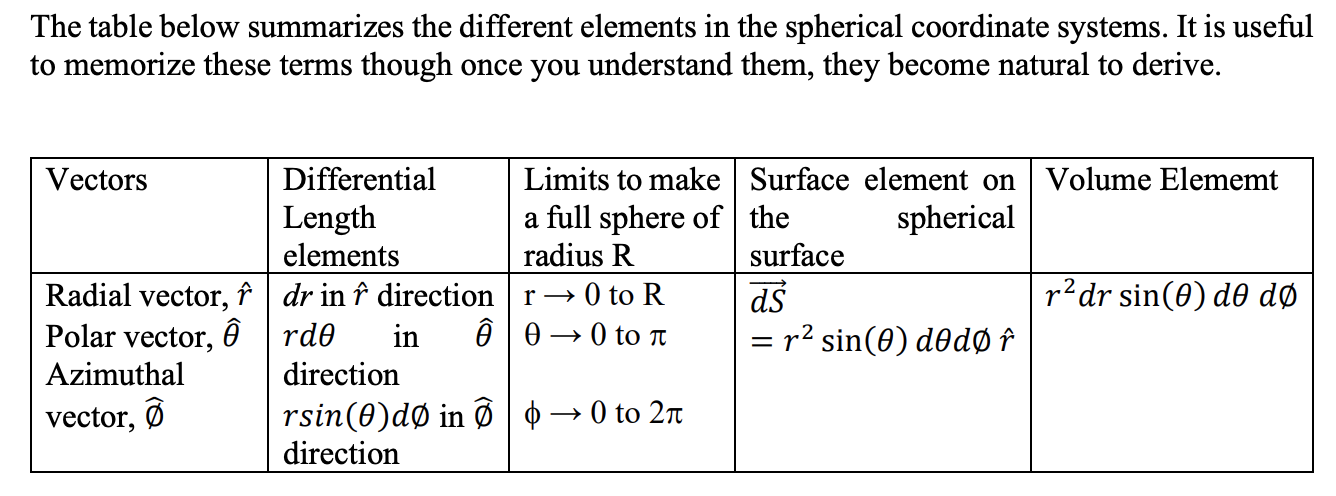
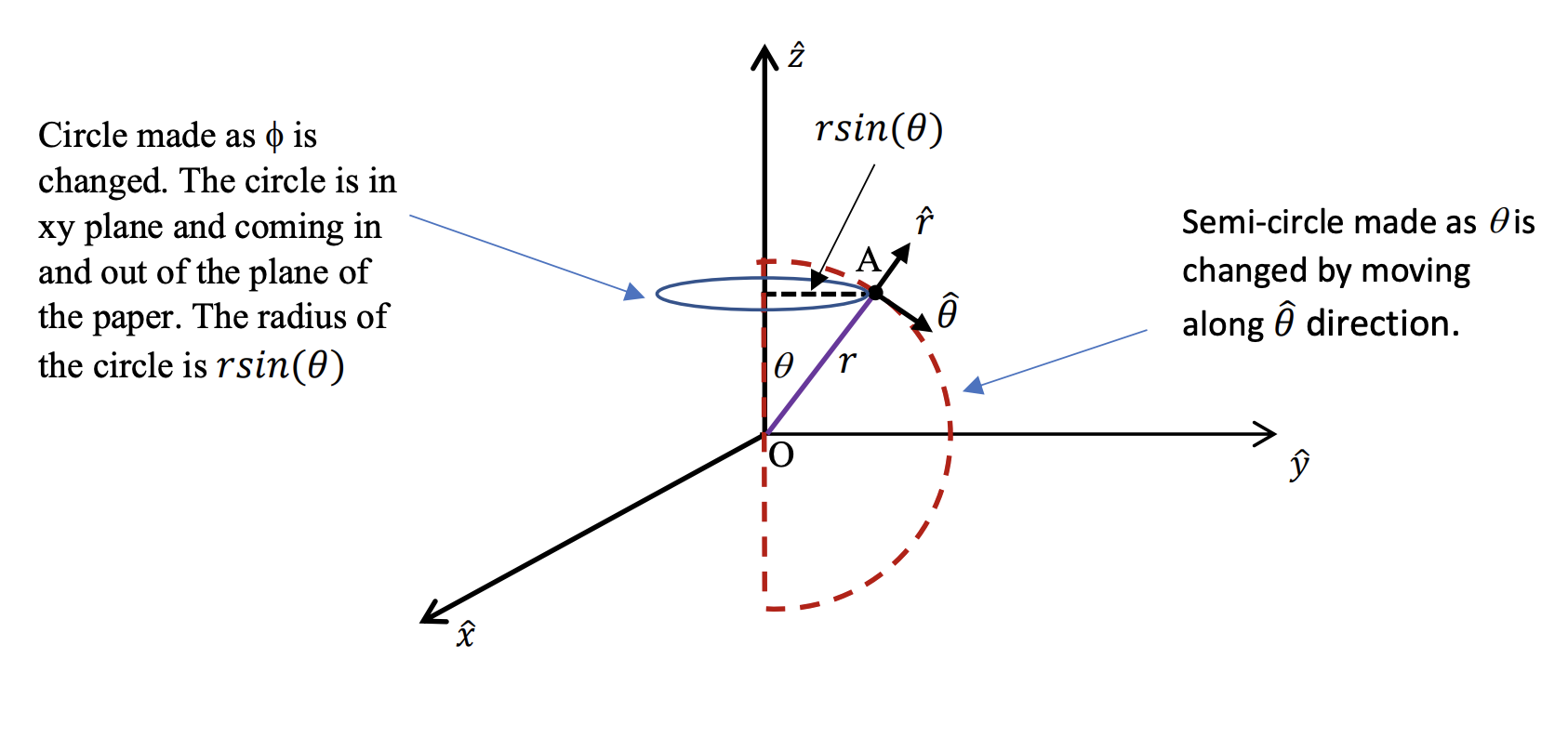
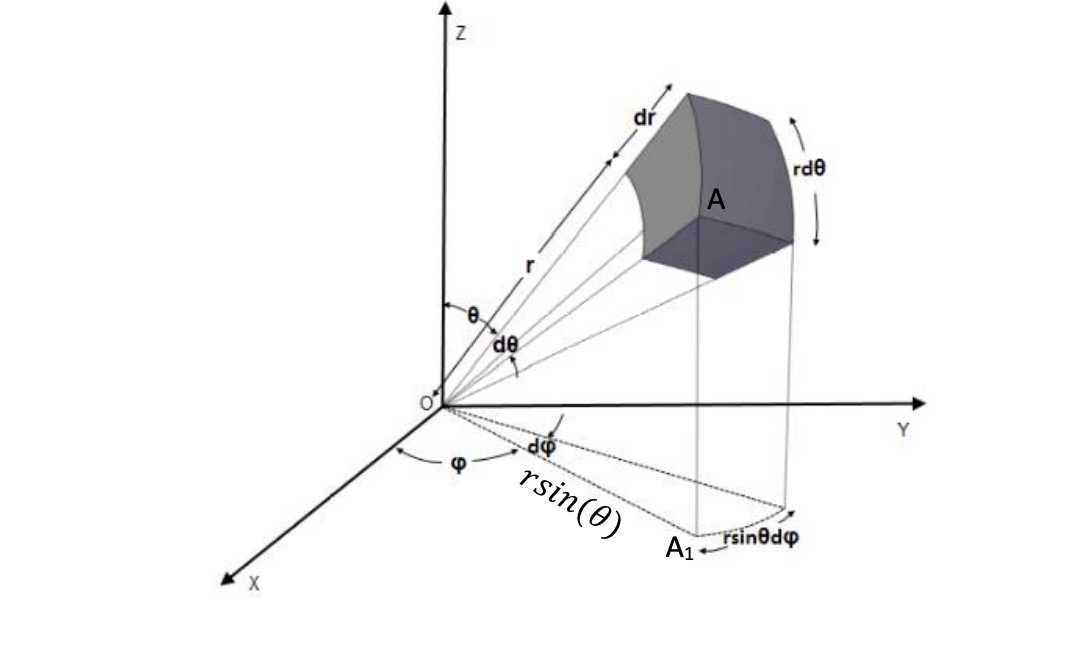
Spherical Coordinate
We will make the z-axis as a principle axis of symmetry. So the sphere will be symmetrically created around the z-axis. We introduce a new vector, 𝜃̂ which changes the angle of the line with respect to the z-axis. This vector is called the polar vector.
Understand the 3 differential elements, should be easy now
Danger
In spherical coordinates, r is the distance of the point from the origin. In cylindrical coordinates, it is the perpendicular distance of the point from the z-axis.