Graph Optimization (Graph-Based SLAM)
Graph Optimization is the modern way to solve SLAM (called Graph-Based SLAM), by expressing the SLAM optimization problem as a factor graph.
Resources
- SLAM textbook
- A quick video by Computerphile explaining this
- Factor Graphs and GTSAM: A Hands-on Introduction
- A Tutorial on Graph-Based SLAM
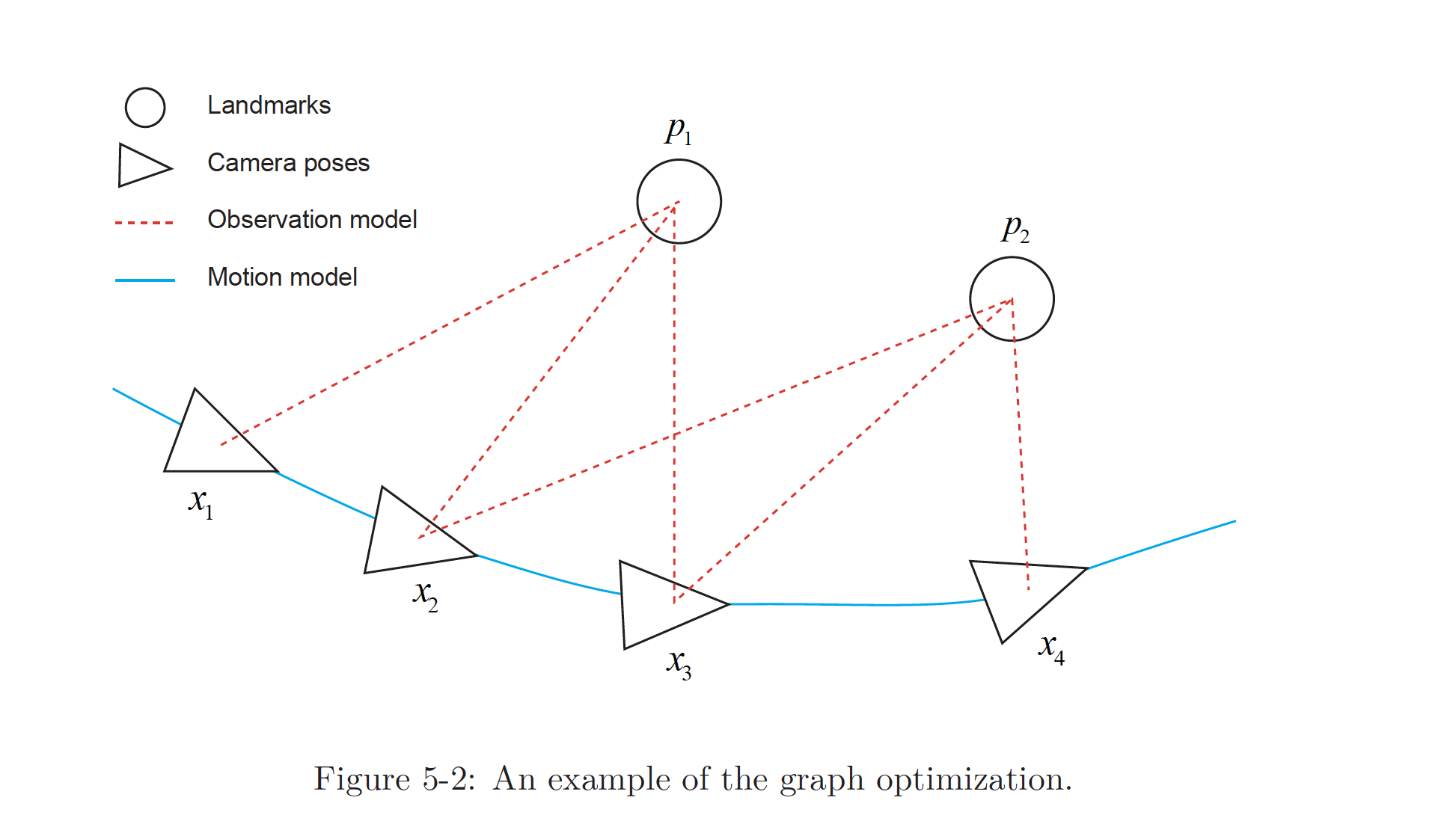
- Vertex represents an optimization variable
- The camera poses and landmarks
- Edge represents an error term
- The reprojection error / motion error
Optimization done through Bundle Adjustment. I use the g2o library to do this.
Name for the graph
The graph itself is called a Bayesian graph or a factor graph. Sometimes called a hypergraph because the edge can be connected to more than two variables, e.g., where an error term is related to more than two variables.
I ran into this after this MPC paper https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=7487277 (make sure you are logged in first) with the super cool video:
- Was linked by Raghava
https://arxiv.org/pdf/1806.00678.pdf
Resources