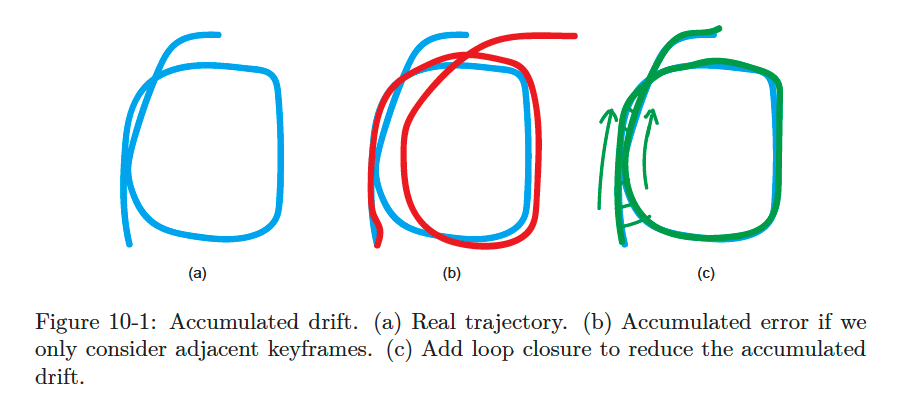
Loop Closure
This is an idea in Robotics, where you need loop closure to correct for the error when you do SLAM.
In practice, when a loop is detected, what this is doing under the hood is merely adding an edge to the Pose Graph!
How to implement loop detection?
- Feature Matching
- not practical in real systems because it works in
- Bag of Words
- faster
Loop Closure
However, I’ve ran into an issue where the loop closure just completely messes up the map.
Loop closure enables SLAM to work. So in real life, doing SLAM without a map is pretty hard.
- Don’t make a false Loop Closure. It’s better to miss a real one than to add a fake one, since loop closures have a lot of weight
There is error/uncertainty in the lidar and odometry measurements.
We generate a binary Occupancy Grid, where the white cells are where you are fully confidence, black are occupied, and grey are unknown.