Structure Matrix
Taught to me by Cyrill Stachniss.
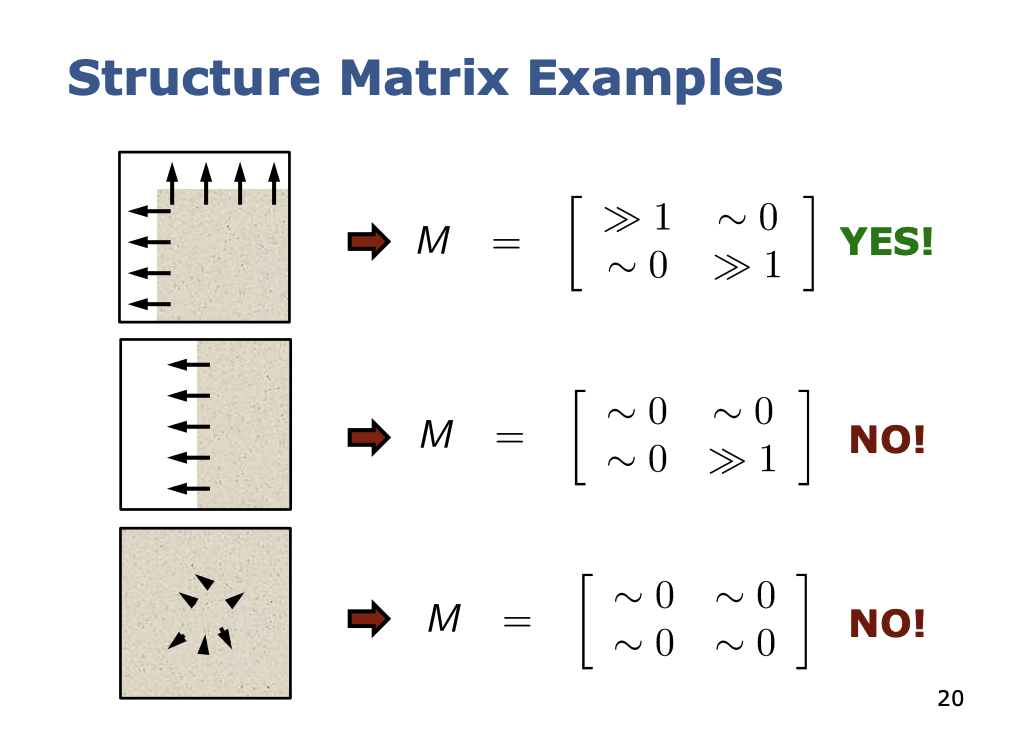
The structure matrix is key to finding edges and corners in an image. It encodes the changes in image intensities in a local area.
- summarizes the dominant directions of the gradient around a point
The structure matrix is constructed by computing gradients (partial derivatives) of the image in both and direction
- Here, and are the gradients (jacobians) of the image at that local patch
How can we calculate these gradients? It seems super intimidating, but you can simply use a kernel!
Use these two approximations:
https://www.ipb.uni-bonn.de/html/teaching/photo12-2021/2021-pho1-10-features-keypoints.pptx.pdf
Go to Keypoint to see more about the ways this structure matrix is precisely calculated.
Derivation
The derivation of a structure matrix comes from the idea that we need to search for intensity changes in two directions.