Optical Frame
When you do cameras, they are expressed in the optical frame.
For ROS, the convention is that you add _optical to specify the extra convention.
The standard convention for ROS is to have in the direction that the robot is moving in. For , the robot looking up.
We don’t like this for cameras, because we like to work exclusively in and , therefore the serves as like the “depth”.
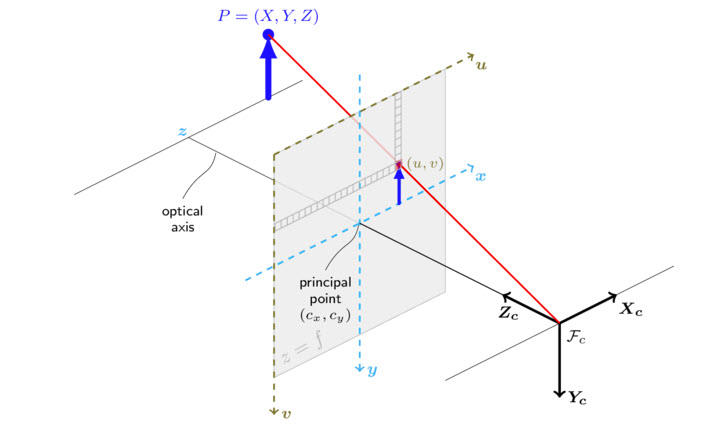
- Source: https://www.fdxlabs.com/calculate-x-y-z-real-world-coordinates-from-a-single-camera-using-opencv/
So X is the Row, Y is the column.
- When we index into an image, we do
img[Y][X].
And notice that the image points down.
Other Notes
I noticed the case such as in the Cyrill Stachniss course that the y-axis is horizontal, and the x-axis is vertical.
- I assume that this is the case because there are