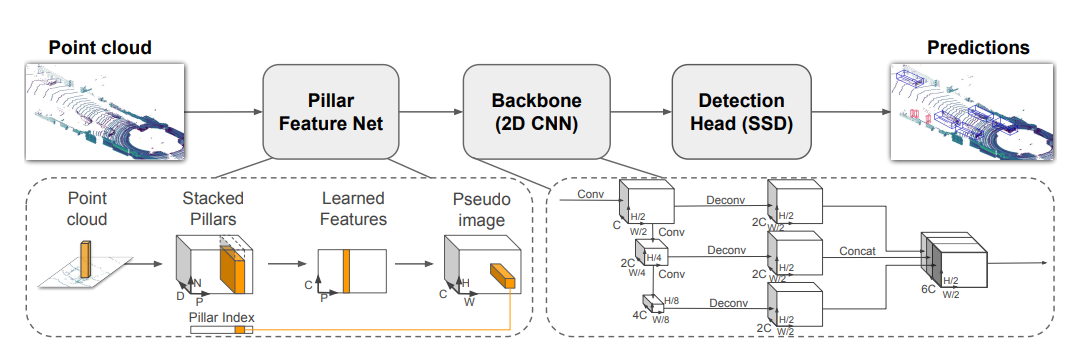
PointPillars
Link to the original research paper: https://arxiv.org/pdf/1812.05784.pdf
Investigate multihead? https://ieeexplore.ieee.org/document/9302666
Task 2
- Change the lidar_cuda/Dockerfile
- Change the params.h file
- Change the lidar_cuda/launch file
So you need to load the models from here https://git.uwaterloo.ca/WATonomous/perception-models/-/tree/add_pp/pp, and then run it on the rosbag and see how it performs.
You already saw how alvin did it with pp_og
You need to change this file: https://git.uwaterloo.ca/WATonomous/wato_monorepo/-/merge_requests/292/diffs#e9343d054f95aaaaabc520e04d7ba50bba29f471 with the corresponding weights from here: https://git.uwaterloo.ca/WATonomous/perception-models/-/blob/add_pp/pp/pp_kitti_small_params.h
Run the model on a rosbag
Record and then share performance on Discord container name: lidar_cuda
year 3 is causing crashes,
/mnt/wato-drive/rosbags/year3/test_track_days
watod run bag_bridge rosbag play -r 1.0 /bags/year3/test_track_days/W20.0/public_road_to_TT.bagpython3 train.py --cfg_file /home/OpenPCDet/tools/cfgs/nuscenes_models/pointpillar_newaugs.yaml
python3 test.py --cfg_file /home/OpenPCDet/tools/cfgs/nuscenes_models/pointpillar_newaugs.yaml --ckpt /home/KITTI/ckpt --eval_all
To test if gpu supports the current torch version or whatever, run
import torch
torch.zeros(1).cuda()python setup.py develop
cd tools
python train.py --cfg_file cfgs/da-nuscenes-wato_models/pointpillar_newaugs.yaml