Axis-Angle Representation (Rotation Vector)
First introduction here through Steven M. Lavalle VR series. Read more into the modern robotics book, chapter 3.
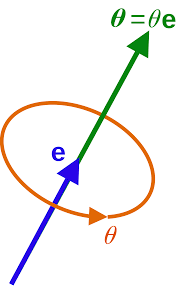
Axis-Angle Representation are implemented with rotation vectors. This vector is parallel with the axis of rotation, and the length is equal to the angle of rotation.
For a rotation axis with unit-length vector and the angle , then the rotation vector is represented by
Euler's Rotation Theorem
All 3D rotations have an axis-angle representation.
But how is the zero angle represented?
It’s always relative to your current Reference Frame, so 0 angle is just 0 degree rotation from current axis.
At first, I thought these were the same as Euler Angles.
But NO! With Euler Angles, we have 3 rotation angles expressed relative to 3 fixed axes , , and -axis (pitch, roll and yaw).
On the other hand, angle-axis representation, expresses a rotation as a single rotation by an angle around a specific axis. Thus, only a 3D vector here is needed to describe the rotation.
Because of Euler’s Rotation Theorem, we know that the 3 rotations can simply collapse to 1 rotation around a given axis: any sequence of rotations in 3D space is equivalent to a pure rotation about a single fixed axis.
Rotation Vector to Rotation Matrix
Rodrigues' Formula
The conversion from rotation vector to rotation matrix is shown by Rodrigues’ formula. The result of the conversion is the follow
where
- is the rotation matrix
- the rotation axis has unit length vector and angle
- is the Skew-symmetric operator
Since the rotation axis does not change after the rotation, we have Therefore, the axis is the eigenvector corresponding to the matrix ’s Eigenvalue 1.
I think you can learn more about the formalization with Lie Algebra.
Usage in Eigen
// AngleAxisd rotation_vector(angle, vector);
AngleAxisd rotation_vector(M_PI/4, Vector3d(0,0,1));