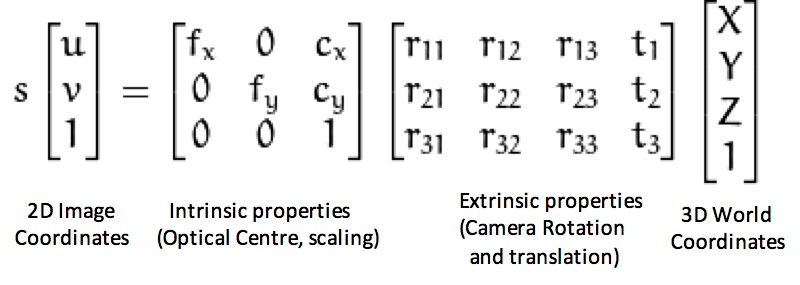
Calibration Matrix
This matrix only represents the Camera Intrinsics.
Most Common Notation
Kajanan told me that the most common form is
- is the shear factor
- and represent the focal length of the camera in terms of pixels for the and axes
- and are the coordinates of the Principal Point
Cyrill Notation
Through Cyrill Stachniss course, I see it through (see Camera Calibration)
so we end up with this calibration matrix
- is the distance between the camera origin and the image plane
- scale difference between and
- Sheer compensation (for digital cameras, we typically have )
So we essentially have this additional scale difference through the Cyrill Stachniss notation, but the scale difference is generally , so we have
Notice
csinstead ofsHere, is merely a skew factor multiplied by , the distance between the image plane and camera sensor. Cyrill makes no mention of focal length, I mean that is what is at the end of the day.