Fundamental Matrix
Used for uncalibrated cameras (intrinsics are unknown). Essential Matrix is used for calibrated cameras.
The fundamental matrix relates corresponding points in stereo images (epipolar geometry).
Resources
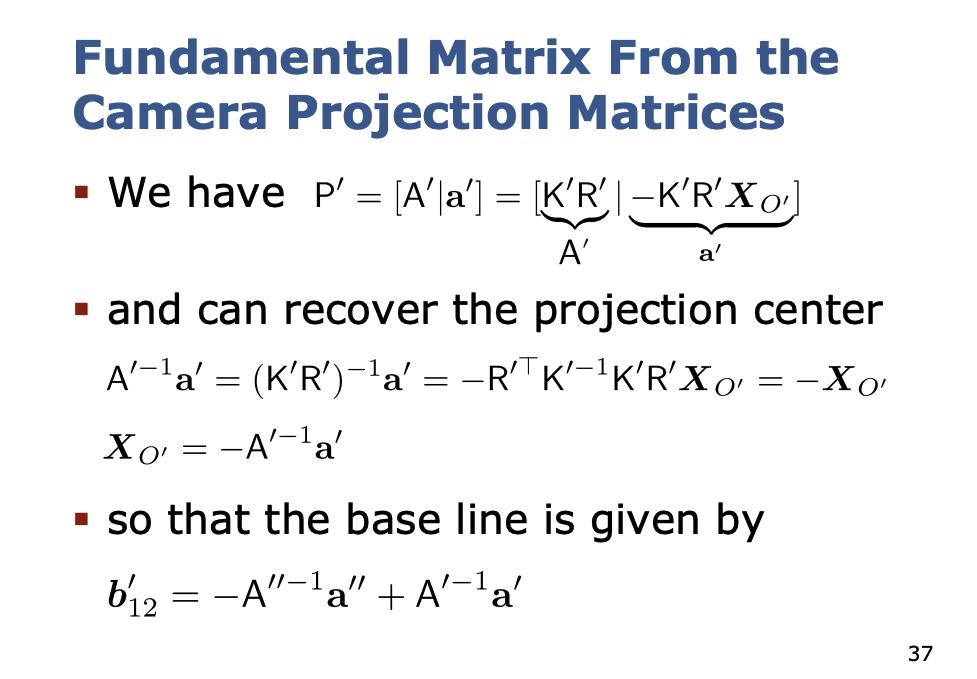
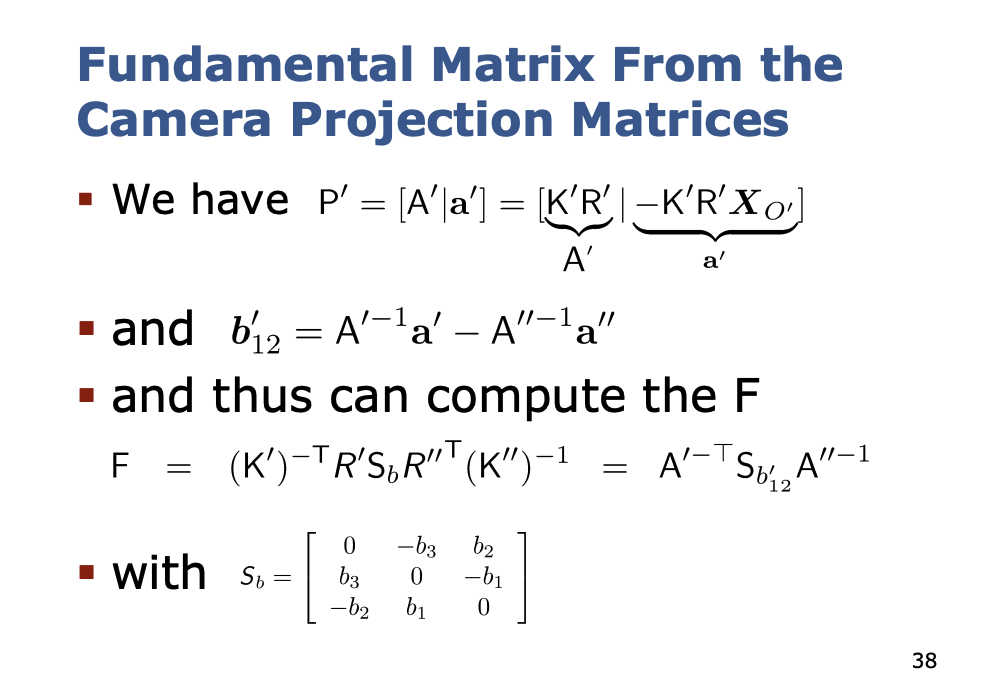
The matrix is the fundamental matrix (for uncalibrated cameras):
It allow for expressing the Coplanarity Constraint by
The fundamental matrix is the matrix that fulfills the equation for corresponding points
The fundamental matrix contains the all the available information about the relative orientation of two images from uncalibrated camera.