Generalized Policy Iteration (GPI)
This is KEY to understanding how reinforcement learning works.
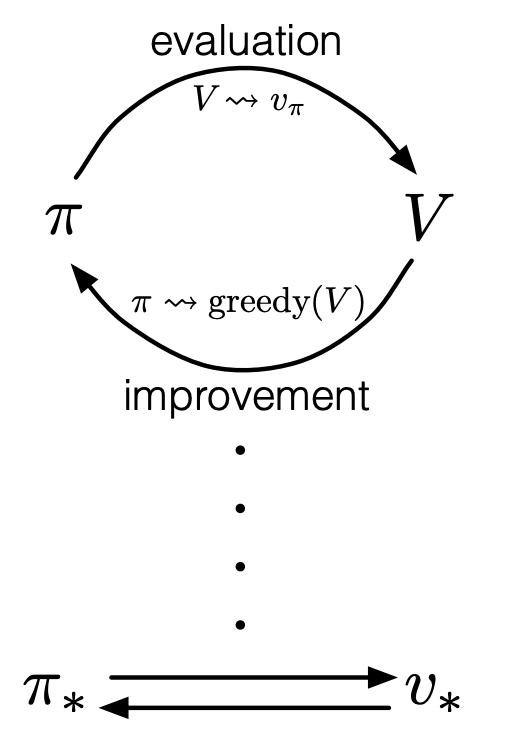
Generalized Policy Iteration refers to the general idea of letting policy-evaluation and policy-improvement processes interact.
- Computing Value Function with Value Function with Dynamic Programming in Reinforcement Learning
- Monte-Carlo Control
- TD Control
Steps
- Initialize policy
- Repeat
- Policy evaluation: Compute for model-free, for model-based
- Policy improvement: update
Key Terminologies
Prediction / Learning → policy evaluation Control → policy-improvement
Some Ideas that I need to master
In David Silver’s diagrams, the up direction is to find , while the down arrows are to find .
With Model-Based problems, we use our full knowledge of the Markov Decision Process, using DP combined with Value Iteration or Policy Iteration..? For the policy improvement, we use a policy that acts greedily with respect to V(s).
However, in Model-Free, where we don’t know the environment, we don’t have that luxury. Greedy policy improvement over V(s) requires model of MDP.
In model-free, we use . We reduce the burden. We can cache?
David Silver teaches two main methods: Monte-Carlo (full backup) and TD (bootstrap).