Nonlinear Optimization Least Squares
Non-Linear Least Squares
A non-linear version of the least squares problem, where the error term is non-linear.
Options to solve:
- Ceres Solver http://ceres-solver.org/
- G2o https://github.com/RainerKuemmerle/g2o
- Eigen?
- Sophus
- CuSOLVER https://docs.nvidia.com/cuda/cusolver/index.html#using-the-cusolver-api
- Found from a quick google search https://github.com/Rookfighter/least-squares-cpp
Notes from Cyrill Stachniss course.
I find the notes from the SLAM Textbook to be really good.
The goal is to minimize the function
We solve it iteratively in the following steps:
Abstract
- Give an initial value .
- For -th iteration, we find an incremental value of, such that the object function reaches a smaller value.
- If is small enough, stop the algorithm.
- Otherwise, let and return to step 2.
- This feels very much like Gradient Descent. How do we find ? In gradient descent, it’s just some step size multiplied by the gradient of the function
Take the Taylor Polynomial expansion of :
- is the first derivative of (called the Jacobian Matrix)
- is the second derivative of (called the Hessian Matrix)
Note
Depending on whether you take or , you end up with first-order method (Gradient Descent) or second-order method (Newton’s Method).
- Gradient descent is volatile due to having to determine the step size correctly, does not guarantee convergence
- Newton’s method is computationally expensive
The book introduces two quasi-Newton methods to avoid calculating directly:
Practical advice
We usually choose one of the Gauss-Newton or Levenberg-Marquardt methods as the gradient descent strategy in practical problems.
- When the problem is well-formed, Gauss-Newton is used
- Otherwise, in ill-formed problems, we use the Levenberg-Marquardt method
In SLAM Context
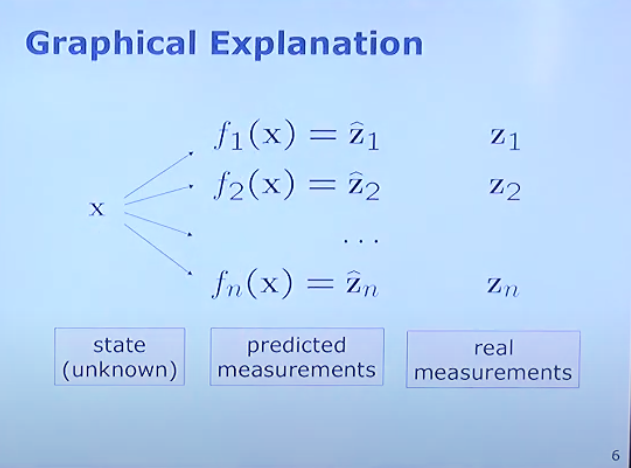
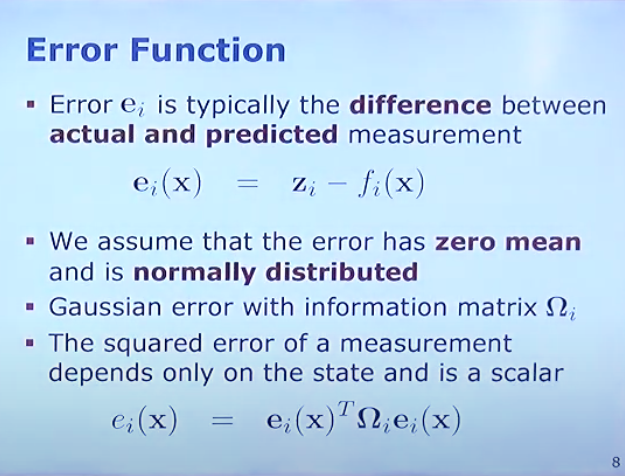
In the context of SLAM, we want to minimize the error between the current observation and the prediction.
So how is F(x) defined?
where
-
so how are those values actually computed?
-
is the 3d coordinate of the point point example
-
is the project of the 2d coordinate onto the 3d plane
What is this equation?
- Depends only on the state