Particle Filter / Monte-Carlo Localization
We need to the particle filter to do Localization. It is a recursive Bayes Filter. Similar to Kalman Filter but relaxes some of the assumptions.
Resources
- 5 minute summary video
- CS287 Particle Filter Lecture, with slides
- F1TENTH Particle Filter Lecture, with slides
Algorithm
- Sample the particles using the proposal distribution
- Compute the importance weights
- Resampling: Draw sample with probability and repeat times
TODO: Insert pseudocode
Running Particle Filter for F1TENTH
On the F1TENTH with an Nvidia Jetson Xavier NX, the pose is published at ~30-40Hz.
Clone the repository by running
git clone https://github.com/f1tenth/particle_filter.gitYou will also need to sudo apt install ros-$ROS_DISTRO-tf-transformations
You will need to install the range_libc library, this is specified in the README.md.
Put the map files (image+.yaml) in particle_filter/maps. Change the map parameter inside particle_filter/config/localize.yaml to reflect the map you want to use.
To start the particle filter, run
ros2 launch particle_filter localize_launch.pyWarning
If your compute doesn’t have a GPU (ex: Raspberry Pi), then the default settings will not work. Change from
rmgputormin thelocalize.yamlconfig file.
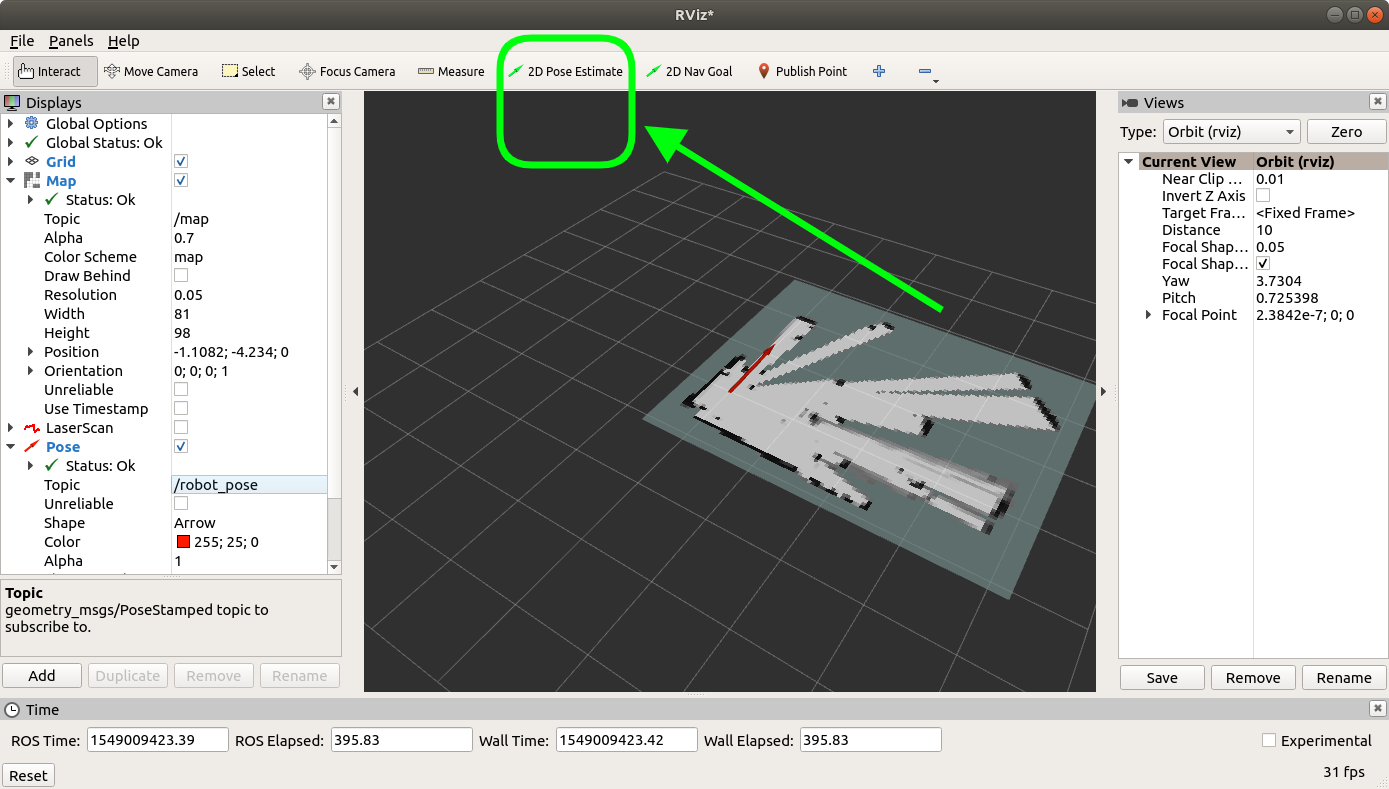
You can then set an initial pose in rviz by clicking the “2D Pose Estimate” button.
nav2 AMCL
I tried the Nav2 version.
This comes part of the navigation stack, which you can run
sudo apt install ros-$ROS_DISTRO-navigation2You can also try the nav2 version
ros2 launch nav2_bringup localization_launch.py
In another terminal, open rviz by running
rviz2
In another terminal, run the following command to load in the map
ros2 service call /map_server/load_map nav2_msgs/srv/LoadMap "{map_url: /home/ubuntu/sw_lab_robotics/maps/0.3x_gmapping.yaml}"
Then, open rviz and set the initial pose estimate.
Though you should specify the params file, which can be found
How fast do you need your particle filter
Depends on the use case. I don’t really have a choice on the f1tenth?
Calculation
Assuming the car goes 7m/s, at 30hz, you travel 7m / 30 = 0.233m. = 23cm
So between each pose, you might be off 20cm.
But I need to double check the Particle Filter.
Monte-Carlo Localization
This is a specific instance of Particle Filtering, where we are trying to localize ourselves in a known map.