Kalman Filter
A Kalman filter is a mathematical algorithm for State Estimation based on noisy measurements.
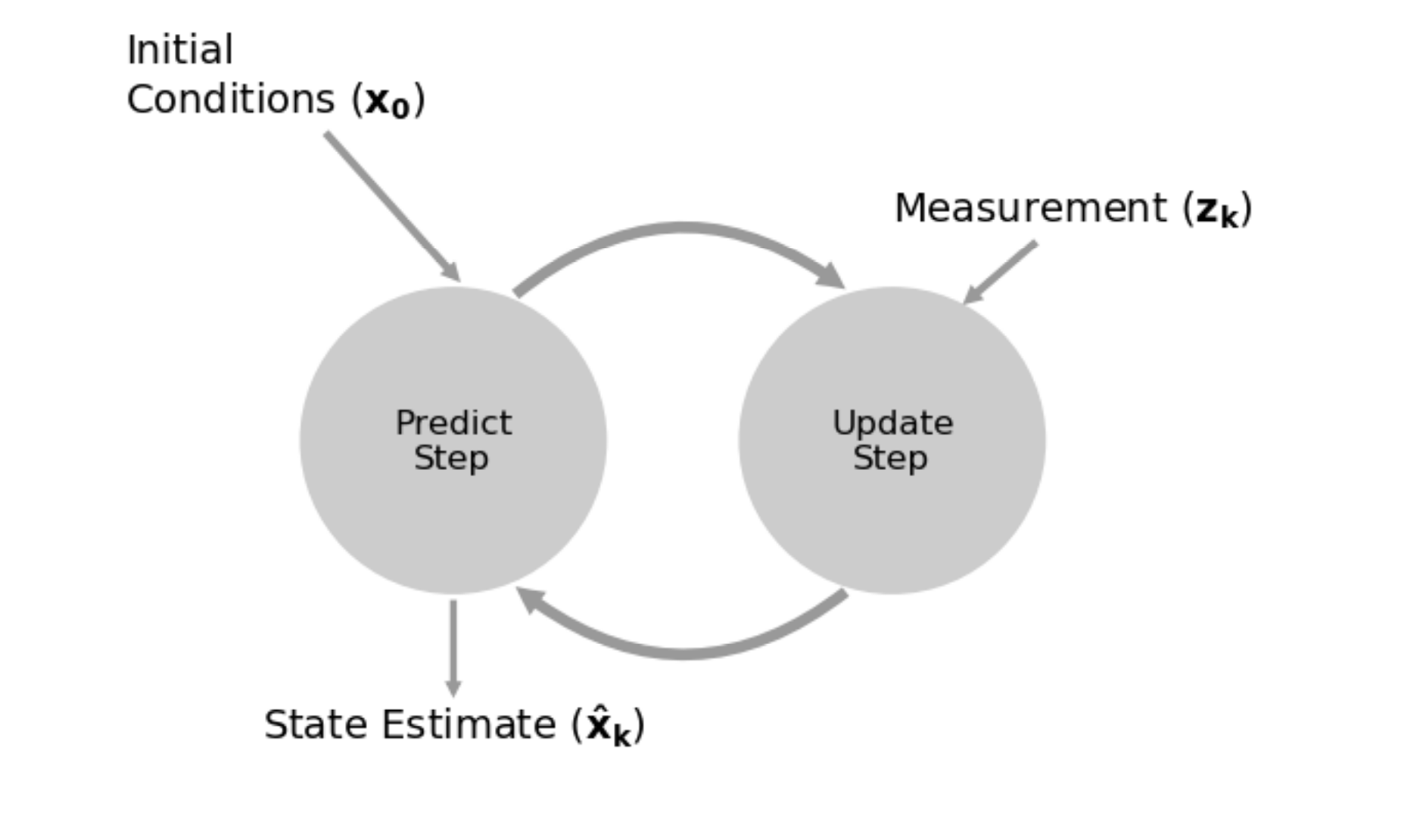
- Recursive algorithm that uses a combination of predictions and measurements to estimate the state of a system over time
Resources
Important Idea
“Multiple data points are more accurate than one data point, so throw nothing away no matter how inaccurate it is”
- Ahh so this is also an idea I heard from Steve Macenski
Kalman Filter Book
These 2 chapters most useful:
- Chapter 2: https://github.com/rlabbe/Kalman-and-Bayesian-Filters-in-Python/blob/master/02-Discrete-Bayes.ipynb
- Chapter 4: https://github.com/rlabbe/Kalman-and-Bayesian-Filters-in-Python/blob/master/04-One-Dimensional-Kalman-Filters.ipynb
First understand Discrete Bayes, which helps you build really solid foundation. Everything else builds on top of this. A kalman filter just uses gaussians.
Instead of histograms used with a discrete Bayes filter, we now use gaussians to model the data.
We have two fundamental equations:
- is gaussian addition, is gaussian multiplication (see Gaussian Operator)
- indicates that it is gaussian
The basic things
def predict(pos, movement):
return gaussian(pos.mean + movement.mean, pos.var + movement.var)
def gaussian_multiply(g1, g2):
mean = (g1.var * g2.mean + g2.var * g1.mean) / (g1.var + g2.var)
variance = (g1.var * g2.var) / (g1.var + g2.var)
return gaussian(mean, variance)
def update(prior, likelihood):
posterior = gaussian_multiply(likelihood, prior)
return posterior# perform Kalman filter
x = gaussian(0., 20.**2)
for z in zs:
prior = predict(x, process_model)
likelihood = gaussian(z, sensor_var)
x = update(prior, likelihood)
# save results
predictions.append(prior.mean)
xs.append(x.mean)However, this notation is rarely used. Below, we will introduce conversion to conventional Kalman filter notation.
In literature, this is the notation (an alternative but equivalent implementation):
def update(prior, measurement):
x, P = prior # mean and variance of prior
z, R = measurement # mean and variance of measurement
y = z - x # residual
K = P / (P + R) # Kalman gain
x = x + K*y # posterior
P = (1 - K) * P # posterior variance
return gaussian(x, P)
def predict(posterior, movement):
x, P = posterior # mean and variance of posterior
dx, Q = movement # mean and variance of movement
x = x + dx
P = P + Q
return gaussian(x, P)The kalman gain tells us how much we trust the process vs. the measurement.
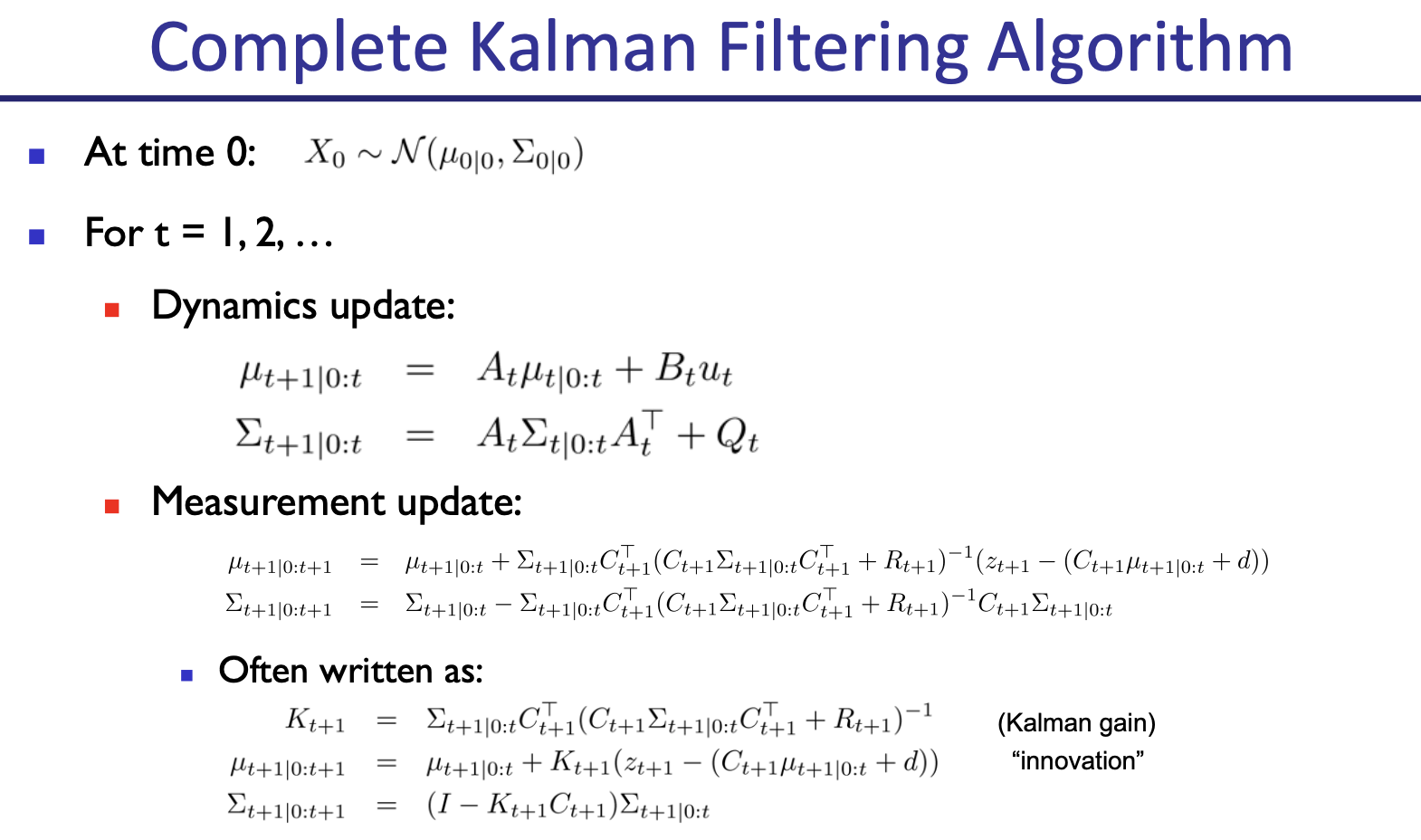
Predict
- are the state mean and covariance
- correspond to and
- is the state transition function
- corresponds to
- When multiplied by it computes the prior
- is the process covariance
- corresponds to
- and model control inputs to the system
Addressing discrepancies
So I think in the univariate cases, we didn’t introduce , a possible control input. So then we had for the multivariate case. Which is fine. But we’re also introducing this control input. I was thinking how the control input was , but no, there are like two possible transitions.
Update
- is the measurement function
- are the measurement mean and noise covariance
- Correspond to and in the univariate filter
- and are the residual and Kalman gain
Your job as a designer
Your job as a designer will be to design the state , the process , the measurement , and the measurement function . If the system has control inputs, such as a robot, you will also design and .
CS287
I was learning about Kalman Filters back in like Grade 9 when I was trying to build a self-balancing rocket. I watched through quite a few lectures.
i was trying to build a Rocket.
They used those things in rockets! Actually, Kalman filters are used everywhere. Self-driving cars, drones, everything I am interested in actually uses the Kalman filter.
From CS287, a Kalman filter is just a special case of Bayes Filter, where dynamics and sensory models linear Gaussians.
Kalman Filter from Visual SLAM book
Notation also used in Visual SLAM.
- is the motion data
- is the observation data
- is the state
- are the landmarks