Q-Learning
Q-Learning is the Off-Policy implementation of TD Control. I first went through this with Flappy Bird Q-Learning.
See Deep Q-Learning for continuous state case.
Tabular Q-Learning
Even though it’s off-policy, we don’t need Importance Sampling!
- We now consider off-policy learning of action-values
- Next action is chosen using behavior policy
- But we consider alternative successor action
- As you’ll see below, we let
- And update towards value of alternative action
- Learned from here
Q-Learning Properties (Off-policy learning)
Q-Learning converges to optimal policy - even if you’re acting suboptimally.
- Sarsa is the on-policy version of q-learning
The above uses the 1-step Bellman Optimality Equation
Q-learning generally uses the 1-step bellman optimality backup. You might wonder if there is a -step version, and indeed there is :)
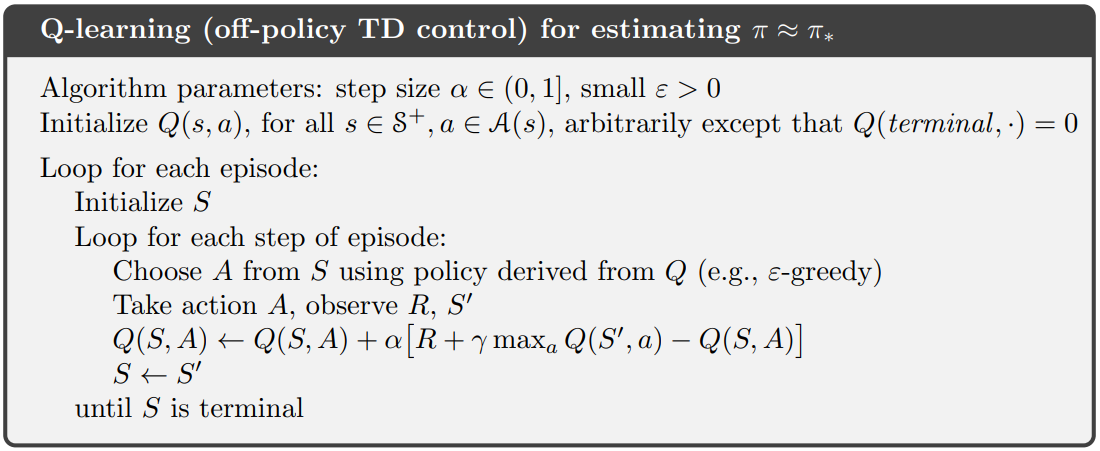
Off-Policy Control with Q-Learning
- We now allow both behaviour and target policies to improve
- The target policy is greedy with respect to
Q-Learning Control Algorithm