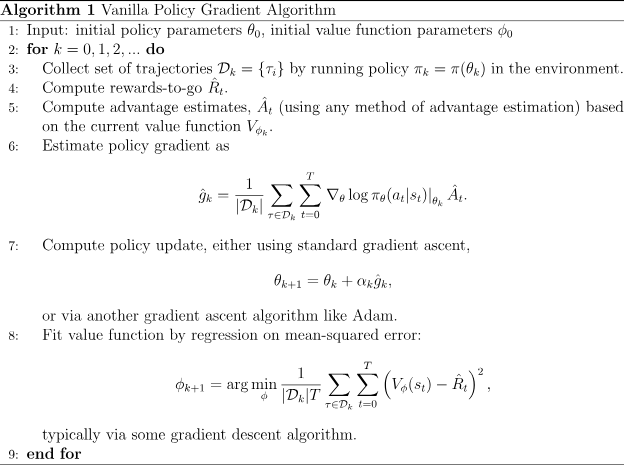
Vanilla Policy Gradient (VPG)
Resources:
- https://spinningup.openai.com/en/latest/algorithms/vpg.html
- Implementation here
Why is there a value function, if we know how to optimize the policy directly?
Add a value network, which estimates expected returns, isn’t required but improves learning in two main ways:
- Variance Reduction: It helps to decrease the variability in policy updates, making learning more stable.
- Better Decision Making: It allows more informed decisions, balancing exploration and exploitation better.
Refer to Generalized Advantage Estimation, if you just used the return of the trajectory, that would be a valid formulation too, but empirically slower?
Spent a little time trying to understand the implementation. The buffer is crucial to get right it seems:
- At the end of very iteration, the replay buffer is reset
- All the other policy gradient methods follow this
VPG is just behavior cloning multiplied by advantage!
I learned VPG after learning about BC! And I was like these equations are awfully similar.
More implementation Details
Looking at implementation here and taking some notes.
Adam Optimizer used:
# Set up optimizers for policy and value function
pi_optimizer = Adam(ac.pi.parameters(), lr=pi_lr)
vf_optimizer = Adam(ac.v.parameters(), lr=vf_lr)Something that is interesting here is that they use an MLP to learn (mean), but for variance , they use a single parameter that is state independent. When you get to SAC, you will see that this is not the case
class MLPGaussianActor(Actor):
def __init__(self, obs_dim, act_dim, hidden_sizes, activation):
super().__init__()
log_std = -0.5 * np.ones(act_dim, dtype=np.float32)
self.log_std = torch.nn.Parameter(torch.as_tensor(log_std))
self.mu_net = mlp([obs_dim] + list(hidden_sizes) + [act_dim], activation)